
На смену громоздким инерциальным измерительным модулям приходят компактные интегральные решения. Они позволяют уместить в одном корпусе датчики, вычислительное ядро и систему питания. Ярким примером такого решения является микросхема FIS1100 от компании Fairchild. FIS1100 представляет собой законченную шестиосевую систему инерциального измерительного модуля с встроенными сенсорами (акселерометром и гироскопом) и высокоэффективным процессорным ядром. Новая микросхема позволяет на порядок снизить уровень потребления при сохранении высокой точности и производительности системы в целом.
 аккумуляторов")

 |
|
| Рис. 1. | Компания Fairchild создала шестиосевой инерциальный измерительный модуль FIS1100. |
Инерциальный измерительный модуль (ИИМ) давно стал неотъемлемой частью всех современных подвижных механизмов: от роботов и дронов до очков виртуальной реальности и спортивного инвентаря (Рис. 2). Времена, когда приложениям было достаточно только лишь гироскопа или акселерометра, остались в прошлом. Теперь даже самое простое устройство требует точного определения положения в пространстве, а для этого необходим полноценный шестиосевой или девятиосевой инерциальный измерительный модуль, который объединяет датчики (гироскоп, акселерометр и иногда магнитометр), процессор и специализированные вычислительные алгоритмы в единую систему.
 |
|
| Рис. 2. | Области применения инерциальных измерительных модулей. |
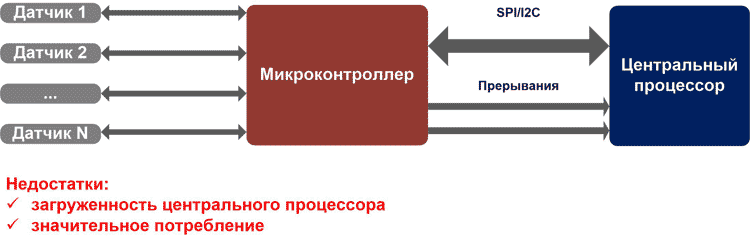
Физическая реализация ИИМ может быть разной. До появления комплексных интегральных решений ИИМ создавались на базе отдельной печатной платы, на которой располагались дискретные микросхемы датчиков (гироскоп, акселерометр, магнитометр), микроконтроллер для обсчета их данных и система питания. Микроконтроллер обрабатывал результаты измерений и передавал их центральному процессору (Рис. 3).
 |
|
| Рис. 3. | Традиционная схема построения инерциальных модулей. |
В последнее время стали появляться комплексные решения в виде SIP и SOC систем. Они представляют собой МЭМС-микросхемы, объединяющие в одном корпусе несколько типов инерциальных сенсоров. В результате получается интегральная 6D или даже 9D система. Это позволяет заменить россыпь датчиков на одну микросхему, что приводит к снижению габаритов, а зачастую и к оптимизации потребления. Тем не менее, инерциальный измерительный модуль имеет все ту же структуру, что и на Рис. 3.
Такое построение ИИМ имеет несколько недостатков. Если используется микроконтроллер общего назначения, то он не может обеспечить эффективную работу из-за высокого собственного потребления. С одной стороны, это связано с отсутствием специализированных аппаратных средств и встроенных алгоритмов расчета. С другой стороны, микроконтроллер имеет на борту «лишнюю» неиспользуемую системную периферию и различные функциональные блоки (память, таймеры и т. д.), которые потребляют ток впустую. Чтобы снизить потребление, приходится уменьшать частоту опроса датчиков. Однако это негативно сказывается на точности и производительности.
В большинстве случаев для решения перечисленных проблем разные производители предлагают идти по одному и тому же пути – пути повышения интеграции и специализации. Это очень наглядно демонстрирует микросхема интегрального инерциального измерительного модуля FIS1100 от Fairchild (Рис. 4).
 |
|
| Рис. 4. | Микросхема FIS1100 – готовый 6D инерциальный измерительный модуль от Fairchild. |
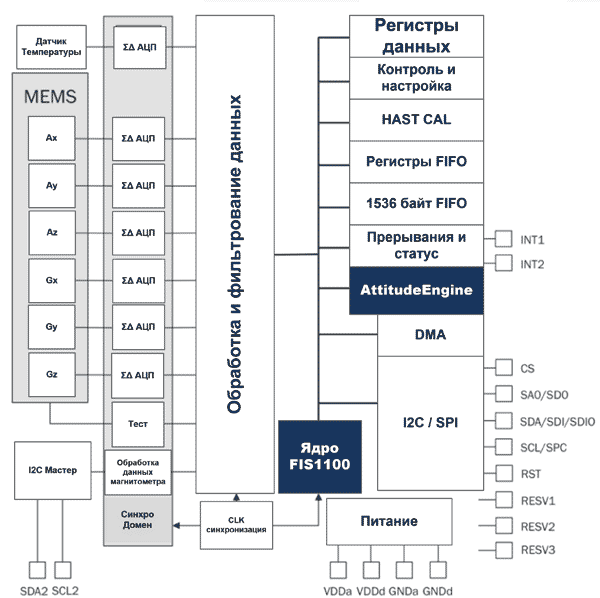
FIS1100 – законченная 6D-система инерциального измерительного модуля, которая объединяет в одном малогабаритном корпусе акселерометр, гироскоп, АЦП, специализированное вычислительное DSP-ядро, буферы данных, систему питания и ускоритель AttitudeEngine (Рис. 5).
 |
|
| Рис. 5. | Структурная схема инерциального измерительного модуля FIS1100. |
Такой состав модуля FIS1100 предполагает значительное упрощение системы измерения в целом (Рис. 6). Для создания 6D-модуля вместо связки «датчики-микроконтроллер-процессор» предлагается использовать связку «FIS1100-процессор», так как все датчики уже находятся на борту у FIS1100. Если же требуется создание 9-осевого измерительного модуля, то к FIS1100 можно без проблем подключить внешний цифровой магнитометр. Для этого у FIS1100 предусмотрен дополнительный I2C-интерфейс и встроены алгоритмы работы с цифровыми 16-битными магнитометрами.
 |
|
| Рис. 6. | Схема построения инерциальных модулей на базе FIS1100. |
Предложенное решение дает сразу три явных преимущества:
- низкое потребление, так как FIS1100 состоит из специализированных блоков и не содержит лишней неиспользуемой периферии;
- малые габариты, которые достигаются за счет высокого уровня интеграции: два датчика, аналоговые и цифровые цепи, система питания, цифровой процессор умещаются в малогабаритном корпусе LGA16 3.3 × 3.3 × 1 мм;
- высокая точность, которая обеспечивается при любой частоте опроса со стороны центрального процессора при использовании буферов и уникального ускорителя AttitudeEngine.
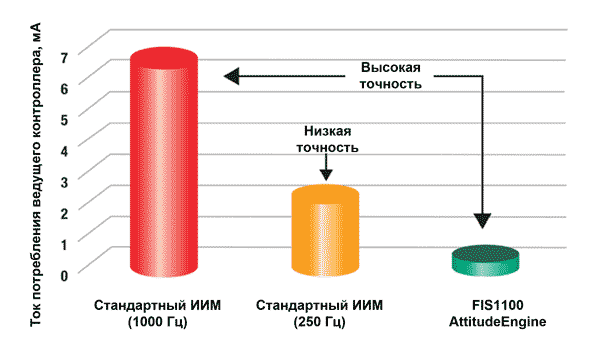
Для того чтобы снизить уровень потребления в типовой схеме (Рис. 3), требуется уменьшать частоту опроса датчиков. Очевидно, что при этом приходится жертвовать точностью и производительностью (Рис. 7). При использовании FIS1100 разработчики могут решить перечисленные проблемы с помощью специализированного ускорителя AttitudeEngine.
 |
|
| Рис. 7. | Снижение потребления инерциального модуля при использовании FIS1100. |
Вне зависимости от скорости обмена с центральным процессором, ускоритель AttitudeEngine опрашивает датчики с максимальной частотой и проводит обсчет их данных. Полученные отфильтрованные и обработанные результаты измерений могут быть считаны центральным процессором в любое удобное время. Таким образом, не смотря на низкую частоту внешнего обмена, реальная скорость опроса может достигать 1000 Гц. Это позволяет одновременно снизить уровень потребления и освободить вычислительные ресурсы самого процессора.
Если требуется бескомпромиссное снижение потребления, то AttitudeEngine следует отключить. В этом случае логично будет организовать обмен с процессором по прерываниям. На время сна «сырые» данные помещаются во встроенный FIFO-буфер объемом 1536 байт.
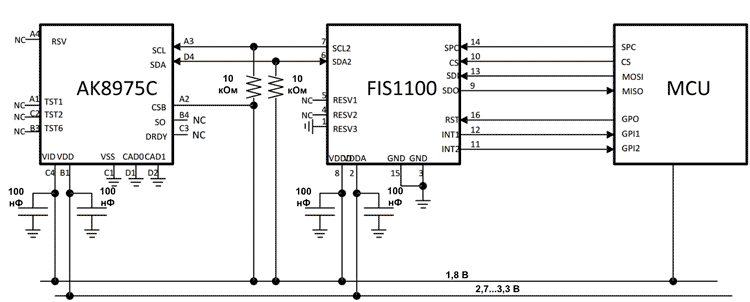
Для связи FIS1100 с процессором используется один из двух типов интерфейсов: SPI или I2C. Кроме того, для подключения внешнего магнитометра в составе микросхемы реализован дополнительный ведущий I2C-интерфейс (Рис. 8).
 |
|
| Рис. 8. | Схема включения FIS1100 при использовании внешнего магнитометра. |
Следует отметить, что FIS1100 позиционируется не только как отдельное решение. Микросхему предлагается использовать с фирменной программной библиотекой XKF3, которая запускается на центральном процессоре. При работе в такой связке удается получить точность ±3° по продольной оси (Roll), ±3° - по поперечной оси (pitch), ±5° - по вертикальной оси (yaw).
Говоря о потенциале нового инерциального измерительного модуля от Fairchild, можно отметить следующие возможные области его применения:
- роботы, дроны, промышленные механизмы;
- игровые устройства и шлемы виртуальной реальности;
- оптическая стабилизация камер;
- спортивные портативные устройства и спортивный инвентарь;
- медицинские портативные приборы;
- системы позиционирования и навигации и т. д.
Характеристики микросхемы инерциального измерительного модуля FIS1100:
точность позиционирования: продольная ось ±3° (Roll), поперечная ось ±3° (pitch), вертикальная ось ±5° (yaw), при использовании библиотеки XKF3 на центральном процессоре;
- частота опроса: 8…1000 Гц;
- встроенный гироскоп: ±32/ ±64/ ±128/±256/ ±512/ ±1024/ ±2048/ ±2560 градусов/c;
- шум гироскопа: 10 (миллиградусов/c)/√Гц;
- встроенный акселерометр: ±2/ ±4/ ±8 g;
- шум акселерометра: 50 мg/√Гц;
- чувствительность внешнего магнитометра: ±16 Гс/ 16 бит;
- напряжение питания: 2.4…3.47 В (общее), 1.62…1.98 В (порты ввода-вывода);
- рабочий диапазон температур: –40...85° C;
- корпус: LGA16 3.3 × 3.3 × 1 мм.
О компании
![]()
Компания Fairchild – одна из наиболее известных компаний-производителей полупроводниковых компонентов. В настоящее время фирма входит в состав ONSemiconductor. Номенклатура компании включает широкий выбор аналоговых и цифровых микросхем, дискретных компонентов, датчиков и т. д.
Посмотреть подробнее характеристики микросхем инерциальных измерительных модулей от Fairchild
 Купить FIS1100 на РадиоЛоцман.Цены
Купить FIS1100 на РадиоЛоцман.Цены
