
Ronak Desai, Cypress Semiconductors
EDN
Статья посвящена методам проектирования и задачам реализации электронных систем управления электровелосипедов/скутеров (E-Bike) с использованием микроконтроллеров (МК) или программируемых систем-на-кристалле (PSoC). Статья носит общий ознакомительный характер и ориентирована на PsoC компании Cypress. В современных проектах электронных систем электровелосипедов (Рисунок 1) используют МК и:


- внешние схемы нормирования и сравнения сигналов для управления трехфазным электродвигателем;
- внешние АЦП и усилители для подключения различных датчиков;
- силовые схемы управления реле световых приборов (стоп-сигналы, головной свет, указатели поворотов);
- светодиодные/ЖК дисплеи в качестве приборной панели.
Программируемые системы-на-кристалле могут значительно упростить схемотехнику электронной системы управления электровелосипеда. На их основе можно создать компактную одноплатную систему, выполняющую функции управления и контроля параметров электродвигателя, измерения значений аналоговых датчиков и отображения различных параметров на приборной панели (ЖК дисплее). PSoC также поддерживают емкостную сенсорную технологию, что позволит заменить механические элементы управления сенсорными кнопками и слайдерами. Интегрированные ШИМ, мультиплексоры и компараторы могут использоваться для управления трехфазным электродвигателем, аналого-цифровые преобразователи и усилитель с программируемым коэффициентом усиления – для подключения аналоговых датчиков температуры и измерения напряжения батареи. Кроме того, PSoC могут управлять внешними реле или силовыми элементами и непосредственно работать с ЖК дисплеем для информирования водителя о температуре, состоянии батареи, скорости движения, пройденном расстоянии и о любых ошибках и неисправностях в системе.
Использование соответствующей интегрированной среды разработки PsoC Creator позволит спроектировать и настроить все необходимые интерфейсы, логику управления и параметры работы PsoC. Эти программные инструменты, как правило, имеют готовые к использованию блоки компонентов для разработки комплексной периферии, такой как емкостной сенсорный интерфейс, АЦП для работы с аналоговыми датчиками, логика управления ШИМ для генерирования звуков, ЦАП и блок управления сегментным/символьным/графическим ЖК дисплеем. Таким образом, с применением PsoC затраты на разработку и себестоимость электровелосипеда могут быть существенно снижены.
 |
|
| Рисунок 1. | Типовая архитектура электронной системы электровелосипеда. |
Рассмотрим немного подробнее основные элементы представленной архитектуры электронной системы.
- Микроконтроллер
В общем случае, МК используется для определения параметров системы с помощью различных датчиков (например, положение дросселя, температура, напряжение батареи, обнаружение препятствий), для аналого-цифрового преобразования и управления выходными компонентами сравнения, а также для управления трехфазным бесколлекторным электродвигателем. Ввиду того, что E-Bike – это система с питанием от батарей, здесь требуется МК с ультранизким энергопотреблением. Также принимаем во внимание, что МК может являться частью центральной системы охраны (центральный замок) и может использоваться для связи с другими внешними устройствами электровелосипеда.
- Мотор-колесо (Hub Motor/Wheel Motor)
Как правило, используется бесколлекторный трехфазный электродвигатель с датчиками Холла или без них (бессенсорное управление).
- Свинцово-кислотная или литиевая аккумуляторная батарея
Для питания систем электровелосипеда могут использоваться различные типы аккумуляторных батарей – от свинцово-кислотных до литиевых. Свинцово-кислотные обычно используются в автомобильной технике.
- Дисплей, клавиатура и органы управления
ЖК дисплей с подсветкой используется для отображения текущих параметров: температуры, напряжения батареи, скорости движения, пройденного расстояния и ошибок системы. Дополнительно может отображаться уровень помощи педалями и соответствующий уровень выработки энергии. В качестве органов управления обычно используются механические кнопки, переключатели или клавиатура.
- Управление питанием
Эта отдельная подсистема, которая обеспечивает питание для функциональных блоков, осуществляет контроль батареи и ее подзарядку. Аппаратные ресурсы МК совместно с внешними компараторами и дискретной логикой могут использоваться для контроля аккумуляторной батареи. Такой подход позволит предоставить пользователю важную информацию о времени работы и ресурсе аккумуляторной батареи.
Теория
В настоящее время в электронных системах электровелосипедов используются 16- и 32-разрядные МК. Они являются "сердцем" электронной системы, управляют всеми функциями транспортного средства и контролируют их выполнение. Как только МК определяет «включение зажигания», он находится в готовности начать управление трехфазным бесколлекторным электродвигателем. Управление электродвигателем осуществляется на основании данных от различных датчиков и сигналов пользователя, каковыми, к примеру, могут быть положение акселератора и статус датчика торможения.
Для хранения данных конфигурации и путевой информации может использоваться встроенная в МК энергонезависимая память (EEPROM) или внешняя микросхема. Также потребуются часы реального времени для отображения точного времени на дисплее.
Измерение окружающей температуры производится с помощью встроенного в МК датчика температуры (не для всех МК) или с помощью внешнего резистивного (аналогового) датчика. Не исключено, что электровелосипед может быть снабжен датчиками препятствий, которые могут использоваться при парковке. По аналогии с автомобилем, в электровелосипеде необходим датчик топлива, микроконтроллер измеряет напряжение батареи, расчитывает время работы и выводит эти значения на дисплей.
Одной из важных задач является управление питанием. В качестве источника питания применяются литиевые или свинцово-кислотные аккумуляторы. Выходное напряжение батареи с помощью схем DC/DC преобразователей понижается для питания МК и периферии. Также в состав секции питания должны входить схема подзарядки, схемы защиты от перегрузки по току, перегрева и неудачного запуска электродвигателя. Многие OEM производители ко всему этому еще требуют обеспечить условия подзарядки внешних устройств (например, мобильный телефон, мультимедиа плеер).
Реализация электронной системы электровелосипеда
Чтобы показать вариант актуального проекта электронной системы электровелосипеда, мы обратимся к программируемым системам-на-крситалле (СнК) семейства PSoC 4 компании Cypress (Рисунок 2). СнК PSoC 4 представляют собой однокристальное решение, объединяющее микроконтроллер, цифровую программируемую логику, высокопроизводительный АЦП, операционные усилители с компараторами, стандартную коммуникационную периферию и таймеры. Интегрированный микроконтроллер, выполненный на ядре ARM Cortex-M0, работает на частоте 48 МГц и имеет до 32 Кбайт Flash-памяти, 4 Кбайт ОЗУ и 2 Кбайт EEPROM.
 |
|
| Рисунок 2. | Архитектура электронной системы электровелосипеда с использованием программируемой системы-на кристалле семейства PSoC 4. |
Из внешних компонентов для управления трехфазным электродвигателем требуются только шесть P-канальных MOSFET и соответствующие драйверы затворов, все остальные необходимые компоненты интегрированы в СнК (ШИМ, мультиплексор, компараторы). Драйверами затворов управляет 16-разрядный ШИМ, параметры рабочего цикла которого меняются в зависимости от требуемой скорости движения, устанавливаемой пользователем.
Встроенные компараторы, усилители с программируемым коэффициентом усиления и 12-разрядный АЦП последовательного приближения с дифференциальными и несимметричными входами тоже найдут применение в электронной системе электровелосипеда. К примеру, АЦП может использоваться для контроля скорости вращения электродвигателя, для преобразования данных от системных датчиков, для определения напряжения батареи. При таком подходе полностьюисключается необходимость использования внешних компонентов.
Благодаря наличию двух токовых ЦАП появляется возможность простой реализации сенсорного пользовательского интерфейса управления. Архитектура PSoC 4 поддерживает емкостную сенсорную технологию (для этого даже предусмотрен специальный компонент в среде разработки) с ручной или автоматической настройкой. Два независимых динамически конфигурируемых блока последовательных интерфейсов (I2C, SPI, UART) могут использоваться для обмена данными с системными или внешними устройствами.
Даже с учетом всего вышеперечисленного ресурсов СнК будет достаточно для непосредственного управления ЖК дисплеем, а широкий диапазон напряжения питания 1.71 – 5.5 В позволит реализовать простое подключение дополнительных внешних компонентов для повышения функционала.
Используя интегрированную среду разработки PSoC Creator, все интерфейсы и логика могут быть созданы с помощью готовых блоков компонентов, например:
- SARADC и PGA для подключения аналоговых сенсоров и работы с аналоговыми входными сигналами;
- компоненты PWM, CLK, MUX и компараторы для управления электродвигателями;
- компонент LCD используется для непосредственного управления символьным или сегментным ЖК индикатором;
- компонент CAN – для реализации интерфейса CAN в автомобильных приложениях;
- компонент RTC может использоваться для измерений в реальном времени с использованием встроенного источника тактовой частоты.
Кроме того, среда разработки открывает для разработчиков доступ к экосистеме компиляторов, операционных систем реального времени и программаторов. Разработчик может создавать свои собственные периферийные блоки при помощи схематического редактора с иерархической структурой.
Например, в нашей системе требуется использование системы защиты от перегрузки по току для выключения ШИМ, управляющего электродвигателем, и остановки электродвигателя. В ее основе схема управления на компараторе, выходные сигналы которой используются для остановки ШИМ при обнаружении условий перегрузки. Для этой схемы с помощью ЦАП устанавливается пороговое значение тока, которое соответствует максимальному току потребления электродвигателя. В процессе работы ток потребления электродвигателя сравнивается с установленным пороговым значением. Выход компаратора подключается к входу «KILL» ШИМ, и если на выходе компаратора высокий уровень, ШИМ отключается, защищая двигатель от повреждения. Стоит заметить, что такая система защиты полностью реализуется с помощью готовых компонентов PSoC Creator, и разработчику нет необходимости писать программный код.
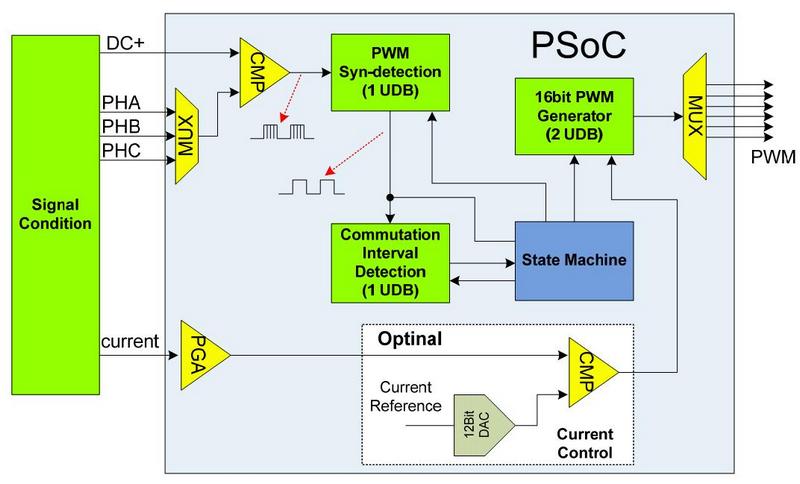
Бессенсорное управление электродвигателем
Бессенсорного управление и контроль скорости вращения электродвигателя не требует использования датчиков Холла, вместо них используется метод измерения обратной ЭДС обмоток электродвигателя в момент пересечения нуля. Во время вращения электродвигателя каждая его обмотка генерирует напряжение - обратную ЭДС, которое противодействует основному напряжению, приложенного к этой обмотке. Полярность обратной ЭДС противоположна полярности напряжения возбуждения и прямо пропорциональна скорости вращения электродвигателя.
 |
|
| Рисунок 3. | Бессенсорное управление электродвигателем на основе PSoC. |
При бессенсорном управлении (Рисунок 3) сигналы обратной ЭДС от трех фаз и постоянное напряжение после схемы преобразования, масштабирования и нормирования поступают в PSoC. Затем PSoC с помощью мультиплексора подключает их к компаратору и сравнивает с напряжением питания. Каскадная цифровая логика выполняет фильтрацию ШИМ сигнала чтобы получить сигнал перехода через ноль. Далее на основе этих данных микроконтроллер будет выполнять задачу управления рабочим циклом ШИМ.
Здесь же, при формировании выходного сигнала ШИМ, учитываются данные поступающие от схемы контроля тока, что позволяет регулировать ток электродвигателя. В основе этой схемы тоже компаратор: ток в цепи обратной связи сравнивается с опорным значением, которое задается 12-разрядным ЦАП. Изменение выходного значения ЦАП приведет к изменению выходного тока.
Управление электродвигателем с помощью датчиков Холла
Управление электродвигателем с помощью датчиков Холла подразумевает определение положений ротора, позволяющих контролировать скорость его вращения. Выходы датчиков Холла подключаются непосредственно к микроконтроллеру, формируя замкнутую систему регулирования.
Основные требования к проекту
Подводя итог можно утверждать, что для выполнения всех ключевых функций электронной системы электровелосипеда (измерения, обмен данными по шине CAN, управление трехфазным электродвигателем, управление ЖК индикатором и внешними устройствами) потребуется высокопроизводительный и быстродействующий МК с быстродействующим АЦП (не менее 500 тыс. выборок в секунду и, как минимум, 10-разрядный), с встроенными EEPROM, Flash и ОЗУ, аналоговой и цифровой периферией.
Система может иметь самый дешевый дизайн панели управления или приборной доски с различным функционалом. В качестве альтернативы в панели управления возможно использование емкостных сенсоров для кнопок, слайдеров и датчиков приближения. Однако, в таком случае не исключается негативное влияние на рабочие характеристики сенсорного интерфейса (например, соотношение сигнал-шум) близкорасположенных светодиодов в передней панели, которые управляются ШИМ сигналом.
Далее следует уделить внимание выбору мощных MOSFET с низким сопротивлением открытого канала и низкой емкостью затвора для управления трехфазным электродвигателем. Разработка платы со схемой мощных драйверов MOSFET, где будут протекать достаточно большие токи, может стать сложной задачей для конструкторов. Также на этом этапе следует учитывать, что электровелосипед является рассчитанной на большие пробеги электромеханической конструкцией, от которой требуются компактность и экономическая эффективность.
Обнаружение неисправностей и механизм восстановления работоспособности являются обязательными для всех транспортных приложений. Для нашей системы подразумевается использование источника питания со схемами защиты батареи от перегрузки по току и перегрева, а также системы защиты и информирования вользователя о неудачном запуске электродвигателя.
Не исключено, что разработчики будут ориентироваться на микроконтроллеры с однократно программируемой памятью, чтобы предотвратить обратный инжиниринг системы конкурентами и хакерами.
Некоторые системные ограничения
Емкостная сенсорная технология позволяет заменить набор механических кнопок сенсорной клавиатурой, не ухудшая надежность продукта. В среде разработки PSoC Creator доступны компоненты CapSense SmartSense, которые снабжены механизмом автонастройки чувствительности сенсорных кнопок и слайдеров, освобождая разработчиков от ручной настройки. Применение емкостной сенсорной технологии позволит также улучшить гидроизоляцию конечной системы. Применение сенсорного интерфейса обеспечит более качественный пользовательский интерфейс и гибкость управления. С этой же целью могут быть добавлены различные интерфейсы (UART и USB) для подключения внешних устройств (iPod/iPhone, медиаплееры) и их подзарядки.
Но, с другой стороны, увеличение количества внешних и внутренних интерфейсов на системной плате увеличивает количество способов, с помощью которых злоумышленник может создать хаос в системе. Это одно из важнейших ограничений такой встраиваемой системы.
Выводы
В настоящее время электронные системы электровелосипедов реализуются на МК. Программируемые СнК – это симбиоз высокопроизводительного МК и ASIC (application-specific integrated circuit, интегральная схема специального назначения). Использование PSoC позволит резко снизить стоимость конечной системы (за счет снижения количества внешних компонентов) и стоимость разработки приложения.
 Купить PSoC4 на РадиоЛоцман.Цены
Купить PSoC4 на РадиоЛоцман.Цены


