
Журнал РАДИОЛОЦМАН, февраль 2015
Владимир Рентюк, Запорожье, Украина


Часть 2. Схемотехника систем управления
Выше были рассмотрены наиболее важные общие вопросы использования шаговых двигателей, которые помогут в их освоении. Но, как гласит наша любимая украинская поговорка: «Не повірю поки не провірю» («Не поверю, пока не проверю»). Поэтому перейдем к практической стороне вопроса. Как уже отмечалось, шаговые двигатели – это удовольствие не из дешевых. Но они имеются в старых принтерах, считывателях гибких и лазерных дисков, например, SPM-20 (шаговый двигатель для позиционирования головки в дисководах 5"25 Mitsumi) или EM-483 (от принтера Epson Stylus C86), которые можно найти у себя в старом хламе или купить за копейки на радиобазаре. Примеры таких двигателей представлены на Рисунке 8.
|
|||||
| Рисунок 8. | Шаговые двигатели, используемые в устаревшей компьютерной технике. а) Шаговый двигатель SPM-20 для позиционирования головки в дисководах 5"25 Mitsumi. (Фото с сайта). б) Шаговый двигатель EM-483 от принтера Epson Stylus C86. (Фото с сайта). |
||||


Наиболее простыми для начального освоения являются униполярные двигатели. Причина кроется в простоте и дешевизне их драйвера управления обмотками. На Рисунке 9 приведена практическая схема драйвера, использованного автором статьи для униполярного шагового двигателя серии P542-M48 [6].
 |
|
| Рисунок 9. | Драйвер униполярного шагового двигателя. (Дополнительная информация по подключению на Рисунках 10 и 12). |
Естественно, что выбор типа транзистора для ключей управления обмотками должен происходить с учетом максимального тока коммутации, а его подключение учитывать необходимость заряда/разряда емкости затвора. В ряде случаев прямое соединение MOSFET с ИМС коммутатора может быть недопустимым. Как правило, в затворах устанавливаются последовательно включенные резисторы небольших номиналов. Но в ряде случае необходимо предусмотреть еще и соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с небольшим током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I = 230 мА ток управления по базе ключа должен составить, по крайней мере, 15 мА (хотя для нормальной работы ключа необходимо, чтобы ток базы равнялся 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы. Как хороший компромисс, можно использовать IGBT, сочетающие в себе достоинства полевых и биполярных транзисторов.
С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC(ON) MOSFET, но с учетом рекомендаций, описанных выше. Мощность, рассеиваемая на ключах для выбранного в качестве примера двигателя серии P542-M48, при полной остановке ротора не превысит
PVT = RDC(ON) × I2 = 0.25 × (0.230)2 = 13.2 мВт.
Транзисторы IRLML2803 с RDC(ON) = 0.25 Ом имеют допустимую мощность рассеяния 540 мВ и постоянный ток стока 0.93 А при температуре 70 °С. Так что, они полностью соответствуют требованиям и обеспечат надежную работу драйвера. В большинстве случаев, учитывая низкие частоты коммутации, проведенной выше оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их выбора и полного расчета можно воспользоваться методикой, приведенной, например, в [7].
Еще одним важным моментов является правильный выбор так называемых снаберных диодов, шунтирующих обмотку двигателя (VD1…VD4 на Рисунке 9). Назначение этих диодов – гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, то неизбежен выход из строя транзисторных ключей и устройства в целом. Обратите внимание, что в мощные MOSFET такие диоды, как правило, уже встроены.
Режим управления двигателем задается коммутатором. Как уже было отмечено выше, наиболее удобным и эффективным является управление с перекрытием фаз (Рисунок 4б). Такой режим легко реализуется при помощи триггеров. Практическая схема универсального коммутатора, который использовал автор статьи как в ряде отладочных модулей (в том числе, и с приведенным выше драйвером), так и для практических применений, приведена на Рисунке 10.
 |
|
| Рисунок 10. | Схема универсального коммутатора шагового двигателя (с реверсом). |
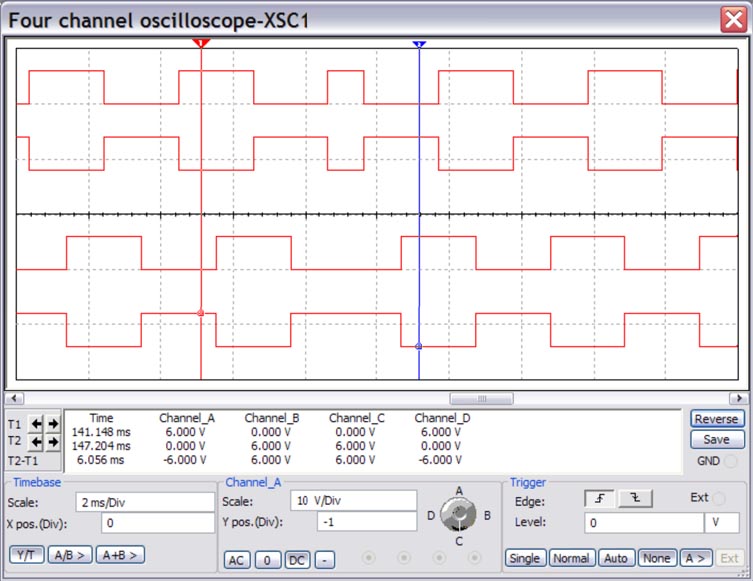
Схема на Рисунке 10 пригодна для любых типов двигателей (униполярных и биполярных). Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «ШАГИ», а направление вращения устанавливается через вход «НАПРАВЛЕНИЕ». Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки (на Рисунке 10 они не показаны). Временная диаграмма работы коммутатора приведена на Рисунке 11.
 |
|
| Рисунок 11. | Временная диаграмма универсального коммутатора с реверсом. Верхние две осциллограммы – Q1 D2-2, Q2 D2-2; нижние две – Q1 D2-1, Q2 D2-1. Маркеры показывают область изменения очередности включения фаз. |
Хочу обратить внимание читателей: в Интернете вы могли встретить похожую схему, выполненную не на D-триггерах, а на JK-триггерах. Будьте внимательны! В ряде этих схем допущена ошибка в подключении ИМС. Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (см. Рисунок 12), при этом частота вращения останется неизменной, а диаграмма управления будет аналогичной той, которая приведена на Рисунке 11 (осциллограммы до переключения очередности фаз).
 |
|
| Рисунок 12. | Упрощенная схема коммутатора шагового двигателя (без реверса). |
Поскольку особых требований к сигналу «ШАГИ» не предъявляется, для его формирования может использоваться любой подходящий по уровням выходного сигнала генератор. Для своих отладочных модулей автор использовал генератор на базе ИМС таймера 555 (Рисунок 13).
 |
|
| Рисунок 13. | Регулируемый генератор импульсов для коммутатора шагового двигателя. |
Для питания собственно двигателя можно использовать схему, приведенную на Рисунке 14, а схему коммутатора и генератора питать или от отдельного источника питания +5 В или через дополнительный маломощный стабилизатор. Земли силовой и сигнальной частей в любом случае необходимо разделить.
 |
|
| Рисунок 14. | Схема питания шагового двигателя с режимами удержания и выключения. |
Схема на Рисунке 14 обеспечивает подачу двух стабильных по уровню напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания. (Формулы, необходимые для расчета выходного напряжения, приведены в [8]). Рабочий режим включается подачей высокого логического уровня на контакт «ТОРМОЗ» разъема Х1. Допустимость снижения напряжения питания определяется тем, что, как уже отмечалось в первой части статьи, момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя P542-M48 момент удержания с редуктором 25:6 равен 19.8 Н·см, а момент вращения всего 6 Н·см. Этот подход позволяет при остановке двигателя уменьшить потребление мощности с 5.52 Вт до 1.38 Вт! Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт «ВКЛ/ВЫКЛ» разъема Х1.
Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах VT1, VT2 необходимости нет, и выходы можно подключить непосредственно вместо упомянутых ключей.
Примечание: В этом варианте использование резисторов подтяжки недопустимо!
В качестве дросселя автор использовал катушку SDR1006-331K (Bourns). Общее питание формирователя напряжения для обмоток двигателя можно уменьшить до 16 – 18 В, что не скажется на его работе. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания.
Задача управления биполярными двигателями более сложна. Основная проблема в драйвере. Для этих двигателей требуется драйвер мостового типа, и делать его, тем более в современных условиях, на дискретных элементах – неблагодарная задача. Да, этого и не требуется, так как имеется очень большой выбор специализированных ИМС. Все эти ИМС условно можно свести к двум типам. Первый – весьма популярная у любителей робототехники ИМС L293D STMicroelectronics [9] или ее варианты от Texas Instruments. Они относительно недороги и подходят для управления маломощными двигателями с током обмоток до 600 мА. ИМС имеют защиту от перегрева; устанавливать ее необходимо с обеспечением теплоотвода, которым служит фольга печатной платы [9]. Второй тип – это уже знакомая читателям по публикации в [1] ИМС LMD18245 [2].
Автор использовал драйвер L293DD в схеме для управления биполярным двигателем малой мощности типа 20M020D2B 12 В/0.1 А во время изучения проблемы использования шаговых двигателей. Этот драйвер удобен тем, что содержит четыре полумостовых ключа, поэтому для управления биполярным шаговым двигателем требуется всего одна ИМС. Полная схема, приведенная в [10] и многократно повторенная на интернет-сайтах, пригодна для использования в качестве тестовой платы. На Рисунке 15 показано включение ИМС драйвера (с привязкой к коммутатору из Рисунка 10), поскольку именно эта часть сейчас представляет для нас интерес, а Figure 6 (Bipolar Stepping-Motor Control) из спецификации [9] не совсем понятна начинающему пользователю. Она вводит в заблуждение, например, тем, что показаны внешние диоды, которые на самом деле встроены в ИМС и прекрасно справляются с обмотками маломощных двигателей. Естественно, что драйвер L293D может работать с любым коммутатором. Выключается драйвер логическим нулем по входу R.
Примечание: ИМС L293, в зависимости от изготовителя и суффиксов, указывающих на тип корпуса, имеют различия в нумерации и количестве выводов!
 |
|
| Рисунок 15. | Схема подключения драйвера L293DD. |
Для более мощных двигателей автор статьи использовал драйверы LMD18245. Полная схема тестового модуля приведена на Рисунке 16.
 |
|
| Рисунок 16. | Схема управления биполярным шаговым двигателем с использованием драйвера LMD18245. |
В отличие от L293DD, LMD18245 является не четырех-, а двухканальным драйвером, поэтому для реализации схемы управления требуются две ИМС. Драйвер LMD18245 выполнен по DMOS технологии, содержит схемы защиты от перегрева, короткого замыкания и выполнен в удобном 15-выводном корпусе ТО-220, что позволяет легко отводить от его корпуса излишнее тепло. В качестве задающего генератора использовалась схема, приведенная ранее на Рисунке 13, но с увеличенным до 4.7 кОм сопротивлением резистора R2. Для подачи одиночных импульсов используется кнопка BH1, позволяющая сдвинуть ротор двигателя на один шаг. Направление вращения ротора определяется положением переключателя S1. Включение и выключение двигателя осуществляется выключателем S2. В положение «ВЫКЛ» ротор двигателя освобождается, и его вращение импульсами управления становится невозможным. Режим удержания уменьшает максимальный ток, потребляемый обмотками двигателя, с двух до одного ампера. Если импульсы управления не подаются, то ротор двигателя остается в зафиксированном положении с пониженной вдвое мощностью потребления. Если же импульсы подаются, то вращение двигателя в этом режиме осуществляется с пониженным на малых скоростях вращения моментом. Необходимо заметить, что поскольку при полношаговом управлении «two-phase-on» включены обе обмотки, ток двигателя удваивается, а схема драйвера должна рассчитываться исходя из требований обеспечения заданного тока двух обмоток (резисторы R3, R8).
Схема содержит описанный ранее двунаправленный двухфазовый формирователь на D-триггерах (Рисунок 10). Максимальный ток драйвера задается резистором, включенным в цепь контакта 13 ИМС LMD18245 (резисторы R3, R8), и двоичным кодом на контактах цепи управления тока (выводы 8, 7, 6, 4). Формула для расчета максимального тока приведена в спецификации на драйвер [2]. Ограничение тока осуществляется импульсным методом. При достижении максимально заданной величины тока выполняется его «нарезка» («chopping»). Параметры этой «нарезки» задаются параллельной RC цепочкой, подключенной к выводу 3 драйвера. Достоинством ИМС LMD18245 является то, что токозадающий резистор, не включенный непосредственно в цепь двигателя, имеет достаточно большой номинал и маленькую рассеиваемую мощность. Для рассматриваемой схемы максимальный ток в амперах, согласно приведенной в [2] формуле, составляет:
где:
VDAC REF – опорное напряжение ЦАП (в рассматриваемой схеме 5 В);
D – задействованные разряды ЦАП (в этом режиме используются все 16 разрядов);
RS – сопротивление токоограничивающего резистора (R3 = R8 = 10 кОм).
Соответственно, в режиме удержания (поскольку используются 8 разрядов ЦАП), максимальный ток составит 1 А.
В заключение необходимо отметить, что драйвер LMD18245 позволяет реализовать и микрошаговое управление. Как упоминалось выше, такой режим уменьшает, и даже подавляет паразитный резонанс ротора. Поддержка такого режима для указанного драйвера осуществляется микропроцессором, управляющим входами ЦАП.
Как можно видеть из предложенной статьи, шаговые двигатели хоть и сложнее в управлении, чем коллекторные, но не настолько, чтобы отказываться от них. Как говорили еще древние римляне: «Дорогу осилит идущий». Естественно, что на практике для многих приложений управление шаговыми двигателями целесообразно делать на основе микроконтроллеров, которые легко сформируют нужные команды для драйверов и выполнят роль коммутаторов. Дополнительную информацию и более детальное рассмотрение проблем, связанных с применением шаговых двигателей, кроме как по упомянутым выше ссылкам [3, 4, 7], можно почерпнуть из ставшей уже классикой монографии Кенио Такаши [11] и на специализированных интернет-сайтах, например, [12].
Есть еще один момент, на который автор статьи хотел бы обратить внимание читателей. Шаговые двигатели, как впрочем, и все двигатели постоянного тока, обратимы. Что имеется ввиду? Если приложить внешнее вращающее усилие к ротору, то с обмоток статора можно снять ЭДС, то есть двигатель становится генератором, причем весьма и весьма эффективным. Автор статьи экспериментировал с этим вариантом использования шаговых двигателей во время работы консультантом по силовой электронике в компании, занимающейся ветроэнергетикой. Необходимо было на простых макетах отработать ряд практических решений. По наблюдению автора статьи, эффективность шагового двигателя в таком применении была выше, чем у аналогичного по параметрам и габаритам коллекторного двигателя постоянного тока. Но это уже другая история.
Литература:
- Рентюк В. «Управление двигателями постоянного тока»
- LMD18245 3A, 55V DMOS Full-Bridge Motor Driver, Texas Instruments Inc., April 2013
- Емельянов А. В., Шилин А. Н. Шаговые двигатели: учебное пособие. Волг. ГТУ, Волгоград, 2005
- en.nanotec.com
- DHS 56 series TECO Electro Devices Co. Ltd.
- Geared stepper motor P542-M48 series, Mclennan Servo Supplies Ltd.
- Дьяконов В. П., Максимчук А. А., Ремнев А. М., Смердов В. Ю. Энциклопедия устройств на полевых транзисторах. М., СОЛОН-Р, 2002
- LM2675 SIMPLE SWITCHER Power Converter High Efficiency 1A Step-Down Voltage Regulator, Texas Instruments Inc., Rev. June 2005
- L293, L293D PUSH-PULL FOUR CHANNEL DRIVER WITH DIODES STMicroelectronics, July 2003
- Rentyuk Vladimir «Control stepper motors in both directions» EDN March 18, 2010
- Кенио Такаши. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ., М.: Энергоатомиздат, 1987 – 199 с.
- stepmotor.ru



