
Введение
По запросу наиболее крупных клиентов выпускаются датчики с особой прошивкой. Такие модели оптимизируются в соответствии с требованиями конкретных приложений. Несмотря на это, большинство разработчиков предпочитает использовать стандартные модели датчиков для своих устройств. Выбор оптимального датчика предполагает знание его особенностей. Разработчик должен учитывать возможные ограничения при написании программного кода. При правильном подходе стандартный датчик без каких-либо проблем может применяться даже в крупносерийных проектах.


Рассмотрим особенности выбора оптимального ультразвукового датчика для системы защиты от столкновения, используемой в мобильных роботах. В данной статье мы покажем основные различия между самыми популярными линейками датчиков и поясним, почему тот или иной датчик будет наиболее предпочтительным. Для получения полной информации о характеристиках каждого из представленных датчиков, следует обратиться к документации.
Наиболее популярными датчиками MaxBotix для систем защиты от столкновения являются: MB1033 из линейки HRLV-MaxSonar-EZ, MB1030 из линейки LV-MaxSonar-EZ и MB1240 из линейки XL-MaxSonar-EZ (Рис. 1).
 |
|
| Рис. 1. | Внешний вид ультразвуковых датчиков MB1033, MB1030, MB1240. |
Габаритные размеры
Все три представленных датчика являются практически полностью совместимыми с точки зрения монтажа. Они имеют одинаковое расположение ультразвукового трансдьюсера и монтажных отверстий. Однако стоит отметить, что на обратной стороне MB1240 расположен трансформатор, но по остальным размерам MB1240 идентичен MB1030 и MB1033. Для получения полной информации о габаритных размерах следует обратиться к документации (MB1033, MB1030, MB1240) или использовать предоставляемые 3D-модели.
Заводская калибровка диаграмм направленности ультразвуковых датчиков
Компания MaxBotix калибрует каждый датчик, чтобы обеспечить повторяемость диаграмм направленности и других характеристик всех выпускаемых сенсоров. Калибровка диаграммы направленности важна, поскольку без соответствующей корректировки показания датчиков могут различаться в три раза. Именно поэтому датчикам от других производителей обычно не хватает стабильности для их использования в крупносерийных проектах.
Обнаружение людей и фильтрация переотражений от боковых объектов
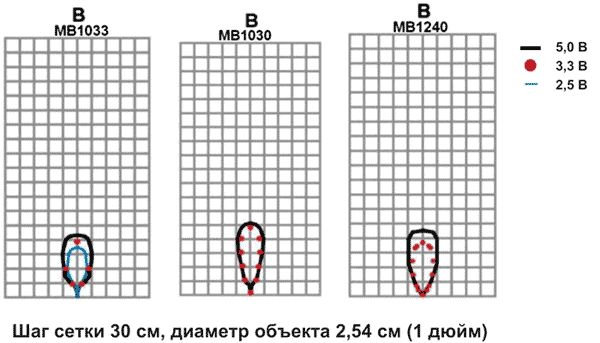
Чтобы продемонстрировать возможности датчиков по распознаванию людей, обычно используют диаграмму обнаружения тестового объекта типа B (диаметр 2.53 см). На Рис. 2 видно, что все представленные датчики обнаруживают людей на расстоянии 1.2…1.5 метра.
 |
|
| Рис. 2. | Диаграммы обнаружения объекта типа B (металлический цилиндр диаметром 2.54 см) для ультразвуковых датчиков MB1033, MB1030, MB1240. |
Как видно из диаграммы на Рис. 2 датчики отличаются ярко выраженной направленностью. Они способны игнорировать отражения от небольших объектов, расположенных вне прямого угла зрения.
К услугам разработчиков предлагаются и другие модели датчиков с большей или меньшей дистанцией обнаружения.
Температурная погрешность и погрешность монтажа ультразвукового датчика
Представленные датчики способны работать в диапазоне температур от –40 °C до + 65 °C. Тем не менее, для большинства приложений очень важно проводить испытания конечных устройств. Правильное тестирование наряду с грамотным выбором датчика и/ или выборочная калибровка могут устранить большинство погрешностей, вызванных особенностями конструкции и монтажа.
Количество ультразвуковой энергии, возвращаемой обратно на датчик, сильно зависит от температуры. Кроме того, излучаемый ультразвук испытывает многочисленные отражения внутри корпуса конечного прибора. Поэтому может оказаться так, что датчик нормально работает при комнатной температуре, но начинает сбоить, когда температура падает ниже 0 °C или поднимается выше 50 °C.
Длина волны ультразвука зависит от температуры, что вызывает соответствующие изменения при взаимодействии звука с окружающими объектами, в том числе и с конструктивными элементами. По этой причине рекомендуется тестировать выбранный датчик во всем диапазоне рабочих температур, чтобы проверить правильность его работы. Если при этом возникают проблемы, то решить их можно за счет выбора другого сенсора, использования пенопластовых вставок или изменения программы.
Работа ультразвукового датчика в широком диапазоне температур
Во всех крупносерийных проектах настоятельно рекомендуется проверять правильность работы датчика во всем диапазоне рабочих температур. Правильное тестирование помогает выявлять любые потенциальные аномалии, вызванные особенностями конструкции или монтажа сенсора.
При производстве датчики MaxBotix испытываются во всем диапазоне рабочих температур от –40° C до + 65 °C.
ПРИМЕЧАНИЕ 1. Каждая линейка сенсоров реагирует на изменение температуры по-разному.
Датчики MB1033 и MB1240 нормально работают во всем диапазоне температур и не требуют ручной калибровки.
Датчик MB1030 автоматически калибрует себя при включении. Это позволяет ему нормально работать при любой температуре. Однако, если в процессе работы температура падает или поднимается более чем на 5 °C, сенсор может начать выдавать некорректные результаты до тех пор, пока не будет повторно откалиброван. В таких случаях инженеры MaxBotix рекомендуют выключить и заново включить датчик.
ПРИМЕЧАНИЕ 2. Повторная калибровка датчика позволяет MB1030 нормально работать в широком диапазоне напряжений и температур при различных конструктивных особенностях крепления сенсора.
ПРИМЕЧАНИЕ 3. Пользователь должен иметь возможность включать и выключать питание датчика MB1030 для выполнения повторной калибровки.
ПРИМЕЧАНИЕ 4. Так как потребление датчика MB1030 чрезвычайно мало, то для его питания можно использовать обычный цифровой порт ввода-вывода микроконтроллера.
Управление питанием ультразвукового датчика
Все три датчика имеют широкий диапазон рабочих напряжений. Для их питания могут быть использованы как источники 3.3 В, так и 5 В. Полную информацию о параметрах питания и потребления можно найти в документации.
Датчики MB1033 и MB1240 нормально работают даже при изменяющемся напряжении питания.
Как говорилось выше, датчик MB1030 выполняет калибровку при включении. Он способен работать в широком диапазоне напряжений питания. Тем не менее, если в процессе работы напряжение падает или увеличивается, необходимо отключить питание датчика и вновь включить, чтобы сенсор мог выполнить повторную калибровку.
См. примечания 2, 3, 4.
Таким образом, датчики из линейки LV-MaxSonar-EZ, и в частности MB1030, не рекомендуется использовать в приложениях, где напряжение питания уменьшается или увеличивается в процессе работы, за исключением тех случаев, когда у пользователя есть возможность выполнять повторную калибровку.
Самокалибровка ультразвукового датчика в процессе работы
Датчики MB1033 и MB1240 калибруются на этапе производства. Если в конкретном приложении возникают аномалии, то MaxBotix предлагает свои услуги по созданию специальных версий сенсоров. Это, как правило, делается для крупносерийных проектов, где калибровка выполняется в рабочем диапазоне температур и затем происходит настройка под конкретное приложение. Обычно заказчик оплачивает создание соответствующей тестовой оснастки и на выходе получает специализированную модель сенсора, отвечающую всем предъявляемым требованиям.
MB1030 имеет встроенную функцию калибровки при включении питания. Она позволяет датчику изучать окружающую среду. Калибровка помогает отфильтровать все переотражения от объектов, находящихся на расстоянии ближе, чем 15 сантиметров. Каждый раз, когда датчик включается, он исследует окружающее пространство. Отключение и повторное включение позволяют пользователю выполнить перекалибровку сенсора. Это позволяет MB1030 нормально работать в широком диапазоне напряжений и температур при различных конструктивных особенностях конечного устройства.
См. примечания 2, 3, 4.
Стоит отметить, что если во время включения питания объект находился рядом с ультразвуковым датчиком, то это приведет к тому, что у датчика могут возникнуть проблемы с распознаванием близлежащих объектов.
Фильтрация постоянных источников шума
Все датчики MaxBotix хорошо справляются с источниками постоянных шумов. Шум, вызванный, например, вентиляторами или пропеллерами дронов, обычно отфильтровывается. Тем не менее, рекомендуется тестировать датчики в той среде, в которой предполагается их дальнейшая эксплуатация. Для лучшей работы в условиях высокого шума следует использовать датчики из линейки XL-MaxSonar-EZ, в частности, MB1240, поскольку они отличаются увеличенной акустической мощностью и обеспечивают повышенную надежность из-за высокого соотношения сигнал-шум.
Фильтрация непостоянных источников шума
Датчик MB1033 выполняет измерения, когда вывод 4 не подключен, или на нем присутствует высокий сигнал. Данный сенсор имеет функцию фильтрации с использованием предыдущих результатов измерений. Поэтому рекомендуется, чтобы MB1033 постоянно находился во включенном состоянии.
Датчики MB1030 и MB1240 выполняют измерения, когда вывод 4 не подключен, или на нем присутствует высокий сигнал. Эти сенсоры не имеют функции фильтрации и сообщают о текущем расстоянии до ближайшего объекта. Обычно датчики обнаруживают объекты только в рамках своего поля зрения. Однако акустические помехи от внешнего источника шума, например от другого датчика, могут привести к тому, что MB1030 или MB1240 не смогут корректно измерить расстояние до объекта.
При использовании нескольких датчиков на одном и том же роботе необходимо согласовывать их работу с помощью выводов 4. В неактивном состоянии вход 4 следует удерживать на низком уровне. Для активизации измерений на вход 4 подается высокий сигнал. Это уменьшает возможность взаимного влияния датчиков, расположенных на одном роботе. Подробнее эта тема раскрывается в статье «How to Use Multiple Ultrasonic Sensors». За дополнительной информацией следует обращаться в раздел технической поддержки MaxBotix.
Перекрестные помехи при использовании нескольких ультразвуковых датчиков
При использовании нескольких ультразвуковых датчиков в одной системе между ними могут возникать перекрестные помехи. Это происходит, когда датчик начинает обнаруживать ультразвук, излучаемый другим датчиком (датчиками). Перекрестные помехи могут ограничивать точность и надежность измерений.
Датчик MB1033 оснащен встроенной функцией подавления перекрестных помех. Она эффективна, когда MB1033 постоянно находится во включенном состоянии. MB1033 может работать с двумя или более датчиками с минимальным влиянием перекрестных помех. В итоге при одновременном нахождении нескольких роботов в одном пространстве датчик MB1033 обычно работает без проблем.
Для подтверждения устойчивости датчиков MB1033 к перекрестным помехам было проведено тестовое испытание. Десять датчиков одновременно работали с одной и той же мишенью, расположенной на дистанции 2 метра. Такой опыт является симуляцией одновременной эксплуатации нескольких роботов. При проведении испытания MB1033 обеспечивал точное измерение расстояния с погрешностью в несколько миллиметров в течение 97% времени даже при одновременном использовании оставшихся девяти сенсоров. Стоит отметить, что 100% измерений имели погрешность менее 10% даже при наличии перекрестных помех. Однако нужно признать, что датчики работают лучше всего, когда не подвергаются воздействию внешних помех. Поэтому необходимо минимизировать количество одновременно используемых сенсоров. Кроме того, следует ограничивать число датчиков, работающих в одном направлении. При необходимости можно ограничить акустическое взаимодействие внутри корпуса, например, с помощью пенопластовых вставок.
MB1240 и MB1030 не имеют функции подавления перекрестных помех. При использовании нескольких сенсоров MB1240 или MB1030 важно не допускать их одновременной работы, для этого следует управлять активностью датчиков с помощью входа 4, как было показано выше. Однако при одновременной эксплуатации нескольких роботов такой механизм защиты от перекрестных помех не работает. Поэтому сенсоры могут начать выдавать некорректные результаты.
Если на какой-либо из датчиков воздействуют перекрестные помехи от других ближайших датчиков, измеряемое расстояние всегда будет меньше реального расстояния до объекта. О наличии перекрестных помех можно судить по постоянным изменениям расстояния до объекта.
Разрешение и точность
Важно понимать, что разрешение и точность – принципиально различные характеристики.
Разрешение – характеризует наименьшее изменение в показаниях датчика.
Точность – определяет разницу между измеренным и реальным расстоянием до объекта.
Датчик MB1033 обеспечивает миллиметровое разрешение и точность 1% в большинстве приложений. MB1033 дополнительно предлагает функцию компенсации размера цели. Дело в том, что при обнаружении малых объектов показания ультразвуковых сенсоров, как правило, оказываются больше, чем истинное расстояние. Функция компенсации MB1033 учитывает это явление и обеспечивает точность измерений независимо от размера цели.
Датчик MB1240 имеет сантиметровое разрешение. В MB1240 нет температурной компенсации, и точность для этой модели не нормируется. Пользователи также могут заметить небольшое изменение точности при обнаружении близлежащих и удаленных целей. Благодаря сантиметровому разрешению, размер объекта слабо влияет на точность, поэтому у MB1240 нет соответствующей встроенной функции компенсации.
Датчик MB1030 имеет разрешение 2.54 сантиметра. Поскольку в MB1030 нет температурной компенсации, точность для этой модели не нормируется. Пользователи также могут заметить небольшое изменение точности при обнаружении близлежащих и удаленных целей. Благодаря разрешению сантиметрового диапазона, размер объекта слабо влияет на точность, поэтому у MB1030 нет соответствующей встроенной функции компенсации.
Компенсация температурной погрешности при определении расстояния до объекта
Важным фактором, влияющим на точность измерения, является скорость звука. Скорость звука в воздухе увеличивается примерно на 0.6 м/с на каждый градус Цельсия. Датчик MB1033 измеряет температуру и выполняет коррекцию показаний с учетом температурной зависимости скорости звука.
MB1240 и MB1030 не учитывают изменения скорости звука и предполагают, что пользователь работает при комнатной температуре. Пользователь может выполнить коррекцию результатов измерений самостоятельно с помощью внешнего датчика температуры. Для получения формулы компенсации температурной зависимости скорости звука следует связаться с MaxBotix.
Обнаружение объектов, расположенных вплотную к датчику
Датчик MB1033 обладает продвинутыми алгоритмами, позволяющими уверено обнаруживать объекты, в том числе те, которые оказываются ближе, чем минимальное расстояние. Очень часто удается надежно распознавать цели, даже если они размещаются рядом с передней поверхностью датчика при его включении.
Датчик MB1240 имеет повышенную выходную мощность для надежного обнаружения целей на всех дистанциях. Огромное количество излучаемой энергии позволяет датчику надежно обнаруживать цели на расстояниях, даже меньше заявленных в документации.
Датчик MB1030 при выполнении измерений учитывает калибровочные данные, полученные при начальной калибровке при включении. Это позволяет датчику обнаруживать различия в форме сигналов, вызванные мишенями на очень близких расстояниях. Однако если напряжение питания, температура или другие параметры окружающей среды меняются, датчики следует выключить и заново включить датчик для выполнения повторной калибровки.
Следует подчеркнуть, что в некоторых случаях датчики MB1030 и MB1240 не всегда гарантированно распознают близкие объекты. Это необходимо учитывать.
Обзор датчиков
MB1033 лучше всего использовать в непрерывном режиме с частотой 10 Гц.
- Это самый простой и удобный датчик для большинства приложений. Он обеспечивает надежное измерение расстояний без каких-либо дополнительных усилий со стороны пользователя. (Продвинутым пользователям следует подумать об использовании MB1240).
- Датчик производит измерения с частотой 10 Гц.
- Во включенном состоянии датчик накапливает данные и выполняет фильтрацию 2 Гц.
- Датчик автоматически выполняет калибровку с учетом температуры и напряжения.
- Датчик легко справляется с большинством источников шума.
- Датчик учитывает изменения скорости звука в зависимости от температуры.
MB1030 способен работать с частотой 20 Гц.
- Для многих применений этот датчик обеспечивает требуемую надежность.
- Датчик способен работать на частоте 20 Гц.
- Датчик определяет расстояние до ближайшего объекта (без фильтрации).
- При использовании этого датчика необходимо самостоятельно учитывать ограничения, накладываемые окружающей средой, отфильтровывать любые ненадежные показания, а также при необходимости дополнительно калибровать датчик.
MB1240 способен работать с частотой 10 Гц.
- Датчик отличается высокой устойчивостью к акустическим шумам, что позволяет ему надежно работать в составе беспилотных дронов.
- Датчик производит измерения с частотой 10 Гц.
- Высокая акустическая мощность обеспечивает надежную работу.
- Датчик определяет расстояние до ближайшего объекта (без фильтрации).
- При использовании этого датчика необходимо самостоятельно учитывать ограничения, накладываемые окружающей средой, отфильтровывать любые ненадежные показания, а также при необходимости дополнительно калибровать датчик.
Посмотреть более подробно технические характеристики датчиков от MaxBotix
 Купить MB1030 на РадиоЛоцман.Цены
Купить MB1030 на РадиоЛоцман.Цены


