
Ультразвуковые сенсоры чаще всего используются в качестве датчиков приближения или присутствия. При этом требования к ним сильно зависят от конкретного приложения. Где-то ключевыми параметрами становятся метрологические характеристики, где-то важнее оказывается рейтинг защиты IP или возможность совместного использования нескольких сенсоров. Компания MaxBotix, являясь одним из лидеров производства ультразвуковых датчиков, предлагает свои решения для самых разных приложений.


Ультразвуковые сенсоры применяют в самых различных приложениях, но наиболее часто их используют в качестве датчиков приближения или присутствия для дистанционного обнаружения объектов. В состав законченного датчика входят: передатчик и приемник ультразвуковых волн, а также цифровые и аналоговые цепи.
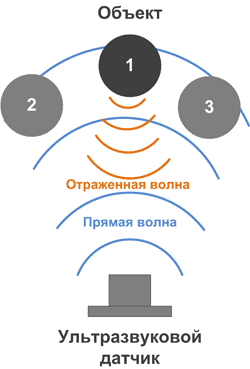
В общих чертах принцип работы ультразвукового дальномера достаточно прост (Рис. 1). Передатчик генерирует периодические импульсы ультразвука (прямая волна). При столкновении с объектом волна отражается и возвращается обратно к датчику (отраженная волна), где регистрируется приемником. Время распространения прямой и отраженной волн (Time of flight, ToF) измеряется с помощью таймера. Зная время пролета и скорость распространения волны, можно определить расстояние до объекта. Точность измерений зависит от разрешения датчика, его устойчивости к внешним фоновым шумам и диаграммы направленности звукового излучения.
 |
|
| Рис. 1. | Принцип работы ультразвуковых датчиков. |
Ультразвуковой датчик – направленный прибор. Это значит, что объект не будет обнаружен, если он находится вне пучка прямой волны. С другой стороны, диаграмма направленности сенсора может быть достаточно широкой, что не позволяет точно определить расположение объекта. Например, на Рис. 1 датчик не «увидит» разницы между положением объектов 1-2-3. Для каждого из них показания сенсора будут одинаковыми.
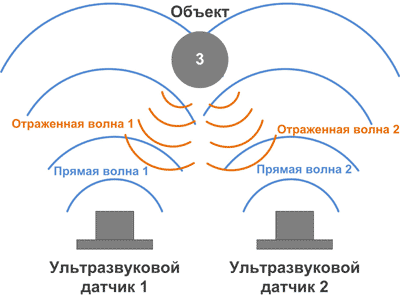
Для того чтобы точно определять расположение объекта в двух измерениях, потребуется как минимум пара датчиков (Рис. 2). В таком случае, зная расстояние между датчиками, а также дистанцию между датчиками и объектом, можно рассчитать его точное расположение.
 |
|
| Рис. 2. | Использование двух датчиков для определения положения объекта. |
Последний пример показывает, что кроме метрологических характеристик важное значение имеет возможность групповой работы нескольких сенсоров. В ряде приложений к датчикам дополнительно предъявляются требования по уровню защиты от пыли и влаги (IP). Все эти аспекты необходимо учитывать при выборе оптимального сенсора.
Компания MaxBotix является одним из лидеров в области производства ультразвуковых сенсоров. Номенклатура компании включает множество семейств и моделей датчиков с самыми различными характеристиками [1]:
- Защищенные и незащищенные;
- С разрешением от одного миллиметра до одного дюйма;
- Специализированные для конкретных приложений (торговые киоски, квадрокоптеры, датчики уровня жидкости и т. д.);
- С выходами различного типа (аналоговый выход, токовый выход, ТТЛ, RS-232, I2C, ШИМ, USB);
- С различными корпусными исполнениями.
Данная статья посвящена обзору и классификации датчиков от MaxBotix, а также рассмотрению их основных особенностей.
Классификация ультразвуковых датчиков компании MaxBotix
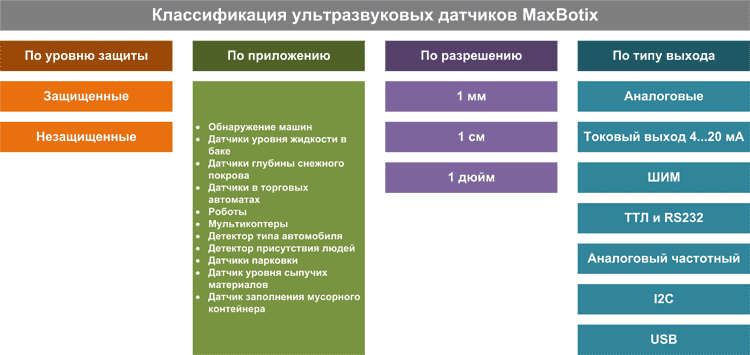
Обзор ультразвуковых датчиков от MaxBotix следует начать с рассмотрения классификации, которую предлагает сама компания-производитель (Рис. 3) [1]. Дело в том, что на сайте MaxBotix к услугам пользователей предлагается пункт меню параметрического поиска Sensor Selection Guide. Используя его и выполнив несколько шагов, потребитель максимально быстро получит перечень наиболее оптимальных датчиков для своего приложения.
 |
|
| Рис. 3. | Классификация ультразвуковых датчиков MaxBotix. |
Шаг первый – выбор требуемой степени защиты. При выборе датчика необходимо учесть возможность воздействия различных негативных факторов: влажности, пыли и механических контактов с окружающими объектами. MaxBotix предлагает два типа датчиков: защищенные и незащищенные [2].
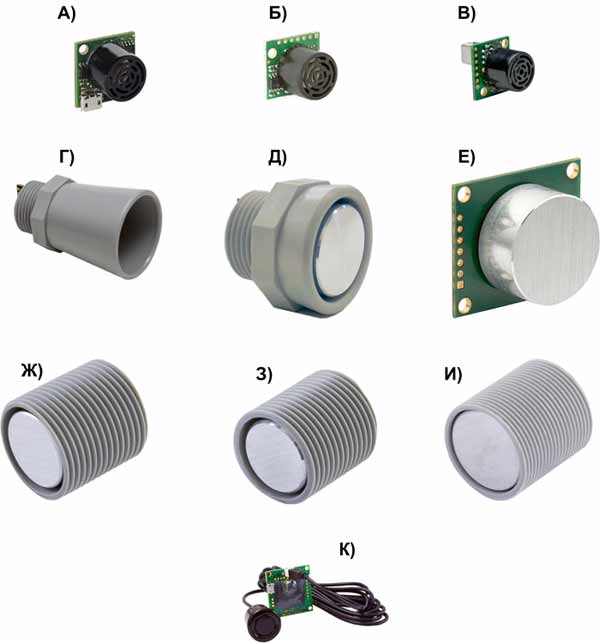
Очевидно, что датчики открытого типа серий EZ/AE (Рис 4, а, б, в, е) не должны иметь контакта с жидкостями, их следует применять только в помещениях с минимальным уровнем запыленности. Не стоит забывать, что ударные нагрузки также недопустимы для большинства ультразвуковых сенсоров из-за высокой чувствительности трансдьюсеров.
Для работы на открытом воздухе, а также при наличии высокой запыленности, следует использовать защищенные сенсоры с индексом WR (weather resistant) с рейтингом IP67 (Рис. 4, г, д, ж, з, и).
 |
|
| Рис. 4. | Конструктивное исполнение ультразвуковых датчиков MaxBotix. |
Шаг второй – выбор конкретного приложения. MaxBotix имеет обширный опыт практического применения своих датчиков в различных областях. По этой причине компания предлагает готовые решения для типовых приложений, каждое из которых предъявляет к сенсором конкретные требования.
Приведем несколько примеров. В случае построения квадракоптеров необходимо иметь повышенную устойчивость сенсоров к акустическим шумам, производимым электродвигателями. Датчики для обнаружения автомобилей работают со значительными расстояниями до объекта, в то время как высокое разрешение роли не играет. Для датчиков уровня жидкости, наоборот важно получать высокое разрешение и устойчивость к воздействию влаги.
В настоящий момент MaxBotix использует следующее разделение своих датчиков по назначению:
- Датчики обнаружения машин (Vehicle Detection);
- Датчики уровня жидкости в баке (Tank Applications);
- Датчики глубины снежного покрова (Snow Depth Measurement);
- Датчики в торговых автоматах (Kiosk Applications);
- Датчики для роботов (Robotic Applications);
- Датчики для беспилотных летательных аппаратов (UAV Applications);
- Детекторы типа автомобиля (Vehicle Profiling Applications);
- Детекторы присутствия людей (People Detection Applications);
- Датчики парковки (Parking Garage Applications);
- Датчик уровня сыпучих материалов (Bin Level Measurement Applications);
- Датчик заполнения мусорного контейнера (Trash Level Measurement Applications).
Кроме того, MaxBotix заявляет о возможности создания датчиков для других приложений по договоренности с пользователем.
Шаг третий – выбор датчика по разрешению и диапазону измерения расстояний. В данном случае выбор вновь зависит от особенностей конкретного приложения. Например, как уже говорилось выше, для системы защиты от столкновений в квадракоптерах разрешение не играет большой роли, зато здесь важно иметь большую дальность действия. Для датчиков измерения уровня жидкости разрешение наоборот является ключевой характеристикой, в то время как дальность оказывается второстепенным параметром.
MaxBotix предлагает датчики с различной разрешающей способностью:
- незащищенные сенсоры с разрешением 1 мм/ 1 см/ 1’’ (Таблица 1);
- защищенные сенсоры с разрешением 1 мм/ 1 см/ 1’’ (Таблица 2).
| Таблица 1. Разрешение незащищенных серий ультразвуковых датчиков от MaxBotix | ||||||||||||||||||
|
||||||||||||||||||
| Таблица 2. Разрешение защищенных серий ультразвуковых датчиков от MaxBotix | ||||||||||||||||||
|
||||||||||||||||||
Шаг четвертый – выбор типа выходного сигнала. MaxBotix предлагает датчики с различным представлением результатов измерений: аналоговое напряжение, токовый сигнал 4…20 мА, ТТЛ, RS-232, I2C, ШИМ, USB, необработанный частотный аналоговый сигнал. Дадим краткую характеристику каждому из них.
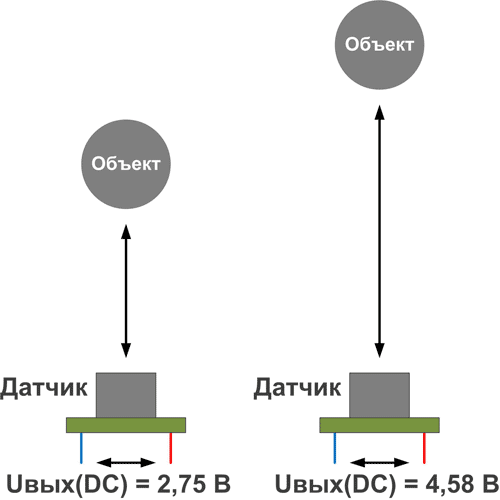
Датчики с аналоговым выходом (Analog Voltage, AN) представляют результаты измерения в виде потенциального сигнала напряжения (Рис. 5). Чем дальше объект, тем больше напряжение. Чувствительность сенсоров зависит от серии и напряжения питания. Например, для датчиков MB1260, MB1261, MB1360, MB1361 с рабочим расстоянием 7.6 м чувствительность составляет (Vcc/1024) В/см. То есть, при использовании питания 5 В разрешение будет ~4.9 мВ/см. При использовании питания 3.3 В разрешение составит ~3.2 мВ/см.
 |
|
| Рис. 5. | Ультразвуковые датчики с аналоговым выходом. |
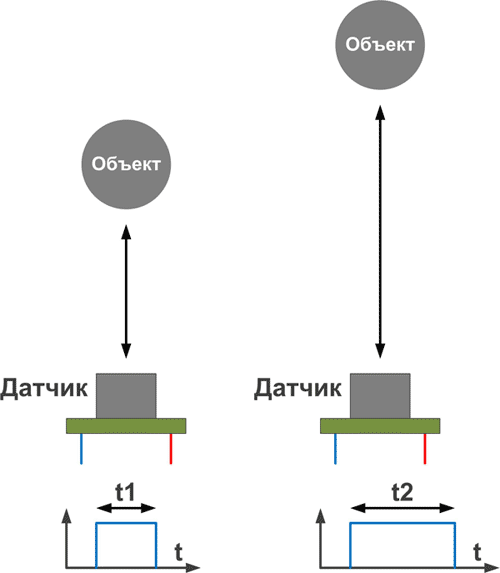
Датчики с ШИМ-выходом (Pulse Width, PW) используют для вывода информации ШИМ-сигнал с коэффициентом заполнения, зависящим от расстояния до объекта (Рис. 6). Чем дальше объект, тем больше ширина импульса. Например, при использовании датчика MB1200 (EZ) соотношение между длительностью импульса и расстоянием до объекта определяется коэффициентом 58 мкс/см.
 |
|
| Рис. 6. | Ультразвуковые датчики с ШИМ-выходом. |
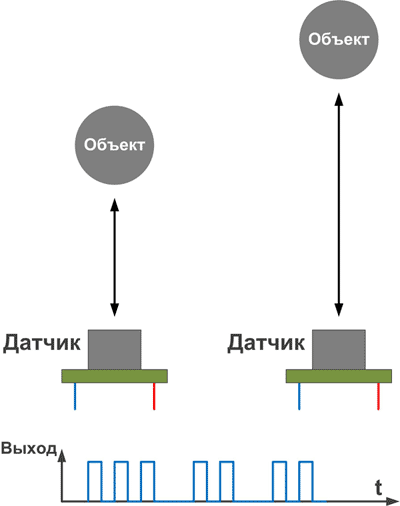
Датчики с последовательным интерфейсом (Serial Data RS-232/ TTL) используют RS-232 для вывода результатов измерений (Рис. 7). Посылка начинается с заглавного символа «R» (ASCII), далее следует результат измерения в двоичном представлении. Такой формат позволяет получать минимальную погрешность. Еще одно преимущество таких сенсоров заключается в том, что их можно подключать к современным мультиметрам, так как в них почти всегда присутствует последовательный асинхронный интерфейс.
В большинстве сенсоров интерфейс RS-232 использует логические уровни 0-Vcc, однако есть датчики, например, MB7380, у которых последовательный интерфейс имеет ТТЛ-уровни сигналов. Датчики из линейки HRLV-MaxSonar-EZ одновременно поддерживают оба вида уровней напряжения выходных сигналов.
 |
|
| Рис. 7. | Ультразвуковые датчики с ТТЛ выходом. |
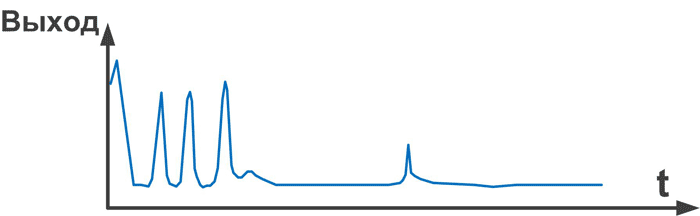
Датчики с аналоговым частотным сигналом (Analog Envelope, AE) дают пользователю доступ к необработанному электрическому сигналу, который по форме повторяет принятые звуковые волны (Рис. 8). Этот сигнал может быть использован разработчиками для дальнейшей обработки с помощью собственных ПЛИС или цифровых процессоров. В таких случаях пользователь самостоятельно реализует алгоритмы обнаружения и фильтрации.
 |
|
| Рис. 8. | Ультразвуковые датчики с аналоговым частотным выходным сигналом. |
В номенклатуре MaxBotix присутствуют сенсоры с выходными интерфейсами USB и I2C.
Также стоит отметить, что большинство датчиков MaxBotix имеет и дискретный выход, который принимает высокий уровень, когда объект попадает в зону детекции.
Теперь, когда рассмотрены основные типы ультразвуковых датчиков MaxBotix, можно привести краткое описание существующих серий.



