
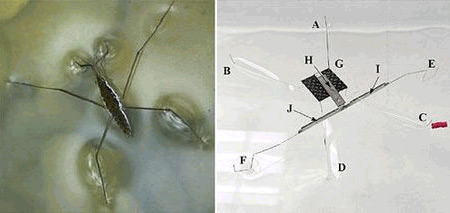


Робот получил название STRIDE (Surface Tension Robotic Insect Dynamic Explorer). На фото он изображен справа, слева – обычная водомерка. Вес робота – 1 грамм, максимальная загрузка – 9,3 грамма. Буквами обозначены: A, B, C, D – опорные лапы; E и F – двигательные лапы; G – туловище с электроникой и источником питания; H – средний привод; I и J – правый и левый приводы. Концы лапок робота покрыты гидрофобным материалом, в роли которого выступает тефлон, приводы – пьезоэлектрические. Поскольку пьезоэлектрические элементы имеют малую амплитуду движения, для ее увеличения используется эффект резонанса. Скорость движения робота составляет 3 см/с (для сравнения – живая водомерка скользит по воде со скоростью 150 см/с).
Пока основной опасностью для STRIDE является волнение воды. Однако ученые полны надежд на усовершенствование робота, с целью повысить его устойчивость и скорость перемещения. В частности, во втором прототипе используются микроскопические моторчики. Хотя вес самого робота при этом увеличился до 6 граммов, скорость удалось поднять до 8,7 см.
Среди практических применений роботов, умеющих бегать по воде, назван мониторинг окружающей среды, образовательные и развлекательные программы.
ixbt
physorg



