
Журнал РАДИОЛОЦМАН, август 2016
МАСТЕР-ЛОМАСТЕР |
Brian Dipert
EDN


Дроны последних поколений стоят $1,000, если не больше. Слишком много для вашего кошелька? А что вы скажете о дроне за $100? Или за $10? Серьезно, в прошлую пятницу я приобрел квадрокоптер Cheerson CX-10 именно по этой цене на сайте уцененных товаров. Ну хорошо, признаюсь… За эти деньги я купил два CX-10, плюс средних размеров вертолет SJ230. (Должен же я был как-то оправдать $5, которые стоила доставка).
SJ230 ожидает будущего препарирования, а сегодняшней жертвой является CX-10, а также его компаньон – беспроводной пульт управления. Начну с нескольких фотографий упаковки:
 |
 |
 |
Внутри вы найдете беспилотник, кабель для зарядки, беспроводной пульт управления и хорошо написанную инструкцию, а также четыре запасных пропеллера.
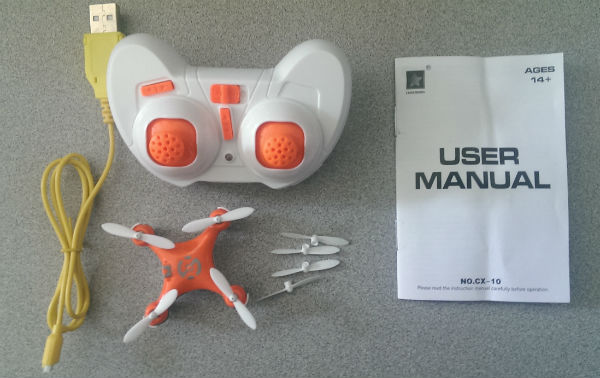
Зарядный кабель достаточно умен; он светится во время зарядки, а когда она завершается, светодиод (я предполагаю) гаснет.


А вот сам дрон крупным планом, повернутый к нам разъемом для подключения зарядного кабеля; также виден выключатель питания:

Далее еще пара фотографий, на одной из которых мой большой палец позволяет сопоставить размеры. На снимке, на котором запечатлен низ квадрокоптера, можно увидеть литий-ионный полимерный аккумулятор, выглядывающий через то, что я полагаю, служит вентиляционными отверстиями. Поэтому я не рекомендую купать этот беспилотник в озере (или, учитывая его размер, в стакане воды).
 |
 |
 |
 |
Винты с нижней стороны были крошечными, но крестовая отвертка под полуторамиллиметровый шлиц с ними справилась:

Также легко были сняты со своих валов четыре пропеллера:

После этого верхняя и нижняя половинки корпуса разъединяются без проблем, открывая находящуюся внутри печатную плату:

Вот крупный план верхней стороны платы:
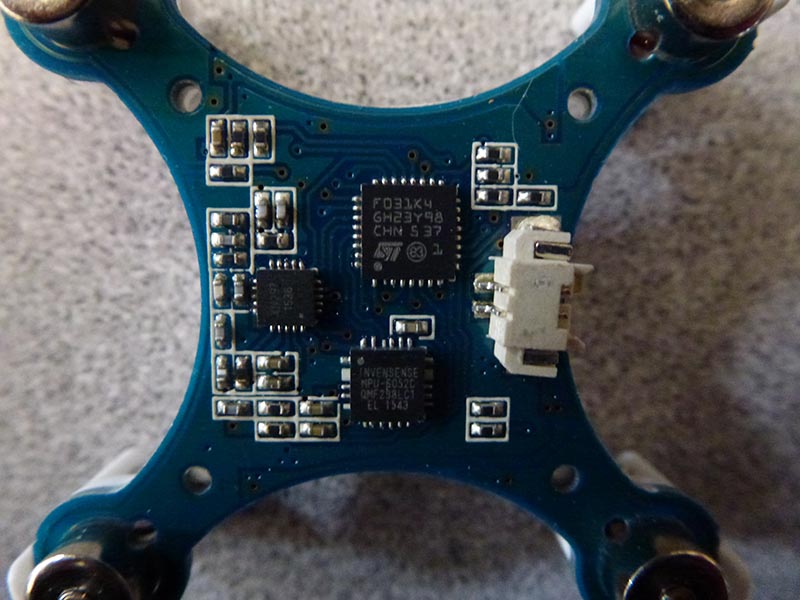
Слева можно увидеть приемопередатчик 2.4 ГГц Panchip Microelectronics XN297, предназначенный для беспроводных мышей и других приложений (его антенну мы увидим чуть позже). Снизу находится МЭМС-микросхема InvenSense MPU-6050, объединяющая функции 3-осевого гироскопа и 3-осевого акселерометра, а также интегрированного процессора движения (все это для очевидных потребностей летающих машин). А то, что сверху – это микроконтроллер STM32F050K компании STMicroelectronics с процессорным ядром ARM Cortex-M0, предназначенный, помимо других вещей, для управления двигателями. Надо же!
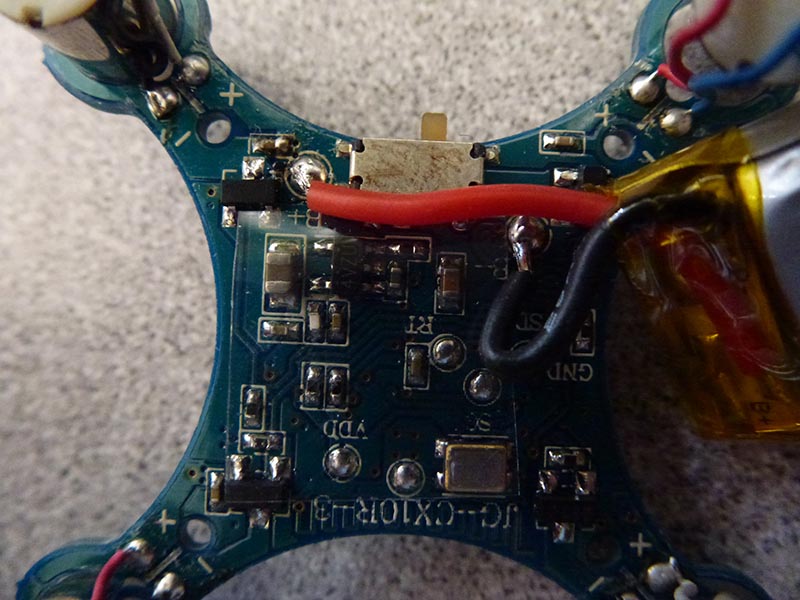
Теперь давайте перевернем плату и посмотрим внимательнее на ранее упомянутый аккумулятор:

Теперь мы видим, что аккумулятор имеет емкость 100 мА×ч, позволяющую дрону находиться в воздухе около 4 минут (а что вы хотели за $10?). На полный цикл перезарядки требуется примерно полчаса. Разборка другого CX-10 (в котором, скорее всего, использовался аккумулятор другого производителя) показала, что напряжение аккумулятора равно 3.7 В.
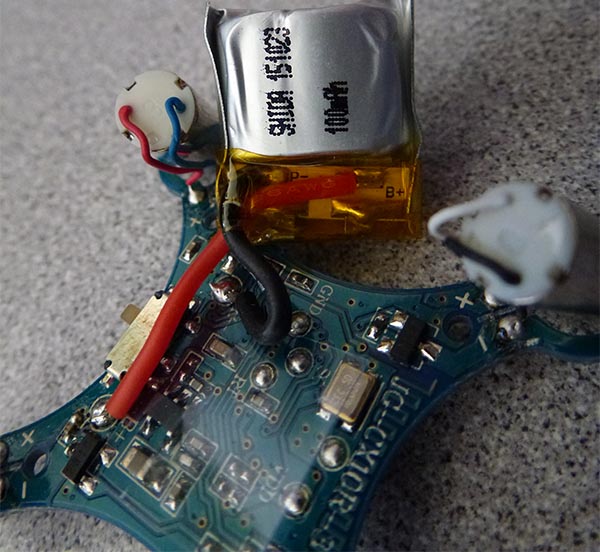
При близком рассмотрении на печатной плате можно заметить дорожку антенны 2.4 ГГц. Кстати, кусок прозрачного пластика, который вы видите, и который служит изолятором между печатной платой и аккумулятором, не приклеен снизу и вообще ни к чему не прикреплен. Выключатель питания сверху также выглядит немного странно, да?
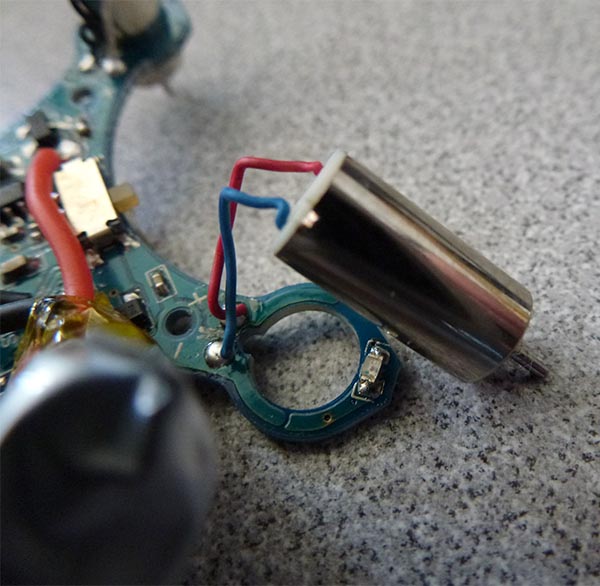
Подводя итог демонтажу квадрокоптера, посмотрим на крупный план одного из двигателей. Обратите внимание также на один из четырех светодиодов, расположенных у лопастей. Вы увидите их в действии немного попозже.
Теперь займемся пультом управления:


Он не комплектуется батарейками, но … хм … моя жена и я должны были испытать дрон перед разборкой, чтобы убедиться, что он работает.


Удаляем два винта, снимаем «грибки» джойстиков и крышку выключателя питания…

…и две половинки корпуса отделяются друг от друга:
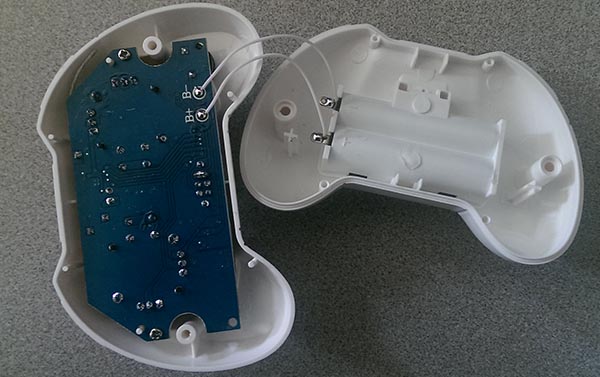
Отвернув еще два винта, можно увидеть верхнюю сторону печатной платы:


В левом нижнем углу находится динамик. Джойстик справа подпружинен, чтобы автоматически возвращаться в центральное положение из всех направлений, он реализует функцию элеронов; его «подстройка» осуществляется с помощью кнопок K3 и K4, находящихся под ним. Джойстик слева, подпружиненный только по горизонтали, предназначен для подъема, спуска, изменения скорости и направления, его подстройка выполняется с помощью кнопок K1 и K2, находящихся справа от него. Также видны многофункциональный светодиод в центре сверху, резонатор 16 МГц в верхнем правом углу, выключатель питания в центре снизу и антенна над левым джойстиком.
Вот печатная плата крупным планом:
К сожалению, 16-выводная микросхема в левом углу полностью лишена маркировки, так что я понятия не имею, кто ее производитель, и какова ее функция. Но…
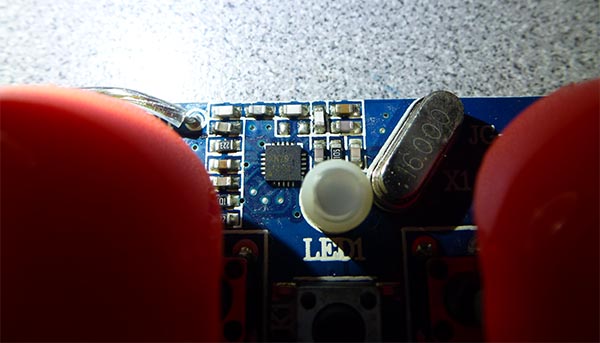
Микросхема в верхнем левом углу от светодиода мне более понятна. Это еще один приемопередатчик 2.4 ГГц XN297 компании Panchip Microelectronics, напарник такого же в квадрокоптере. Его примитивная антенна снова частично видна в левом верхнем углу.
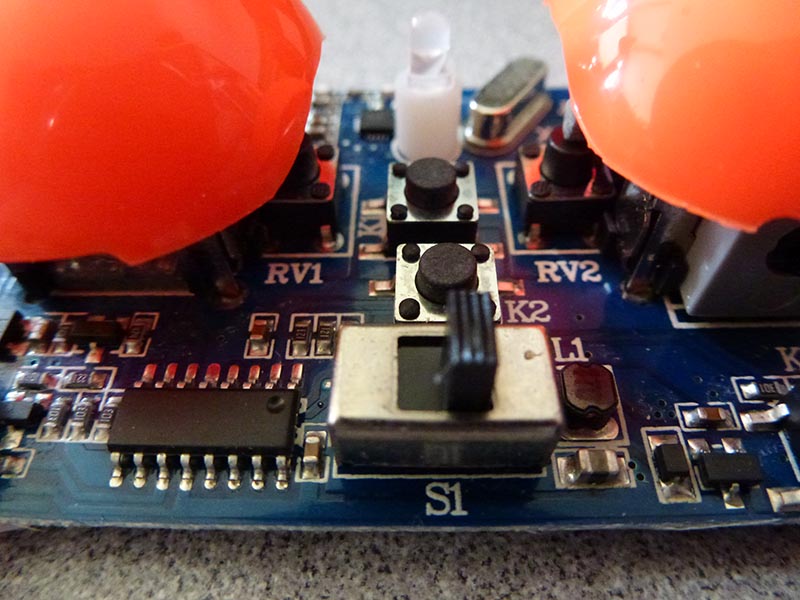
Один из аспектов конструкции, однако, полностью сбивает меня с толку. Под двумя джойстиками находятся еще две кнопки, маркированные как RV1 и RV2:
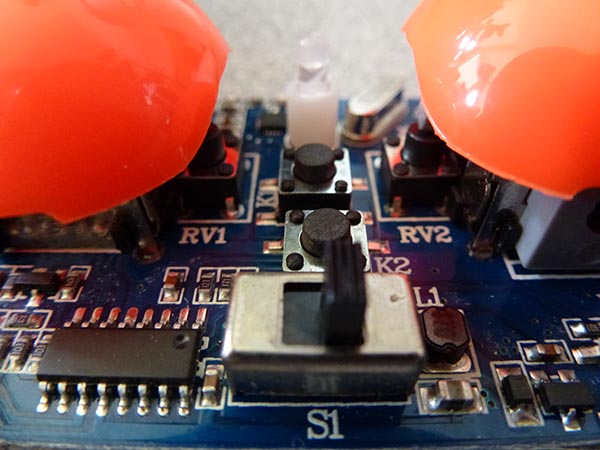
Еще один вид:
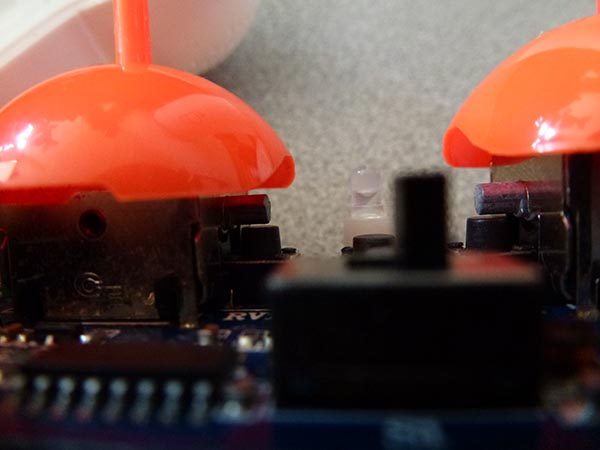
Как вы можете видеть, из каждого джойстика торчат какие-то выступы. Но, хоть убейте, я так и не смог заставить их придти в соприкосновение с этими кнопками, чтобы нажать на них. Поэтому я понятия не имею, для чего они там нужны.
Хорошие новости! После аккуратной сборки дрона и пульта управления все заработало как раньше. Вот контроллер с включенным питанием (мигание его светодиода в сочетании с тонами динамика дает понять, установил ли пульт связь с беспилотником, или нет):

А вот квадрокоптер с включенным питанием:

Честно признаюсь: при повторной сборке у меня была только одна проблема. Когда я включил дрон, его винты закрутились с сумасшедшей скоростью, но от стола он так и не оторвался. Присмотревшись, я понял, что винты не были одинаковыми; некоторые лопасти были наклонены влево, другие вправо, и я, очевидно, установил их не в тех местах. К счастью, мне было с чем сравнить – ведь я купил два квадрокоптера. И, как я потом понял, вместо этого можно было бы просто посмотреть на чертеж, опубликованный на сайте производителя.



