
Константин Староверов
В статье дан обзор представителей семейства драйверов шаговых двигателей (ШД) компании ON Semiconductor – AMIS-30532/42. Драйверы предназначены для управления двигателями повышенной мощности. С их помощью можно диагностировать неисправности в цепях подключения ШД. Драйверы имеют чрезвычайно простую схему включения с минимальным числом внешних компонентов, что открывает перспективы их использования в критичных к себестоимости применениях.


Шаговые двигатели популярны в качестве основы исполнительных механизмов разнообразных технических средств. Регулировка положения фар или заслонок, задание направленности антенны, управление камерой видеонаблюдения, создание светодинамических эффектов – примеры задач, которые с успехом решаются применением ШД. Одна из самых простых конструкций ШД получила название биполярной. Она предусматривает наличие двух обмоток и, таким образом, требует подключать к управляющей электронике по четыре провода. Однако для управления таким двигателем требуется достаточно насыщенный силовой каскад, состоящий из двух полномостовых коммутаторов, реализация которого в виде дискретного решения бросает серьезный вызов сложности и стоимости проекта. Убедительным ответом на данный вызов стало появление семейств драйверов AMIS-305xx и AMIS-306xx, которые интегрируют все необходимое для управления биполярным ШД и, таким образом, дают в полной мере воспользоваться преимуществами его конструкции. Задачей данного материала является ознакомление с последними приборами ON Semiconductor – AMIS-30532 и AMIS-30542.
Появление последних представителей в семействе AMIS-305xx является ответом на растущую потребность в драйверах для управления более мощными ШД. Прежде нагрузочная способность драйверов ON Semi ограничивалась чуть более чем полутора амперами. Теперь же появился доступ к более мощным драйверам на токи до 3 (AMIS-30532) и 5.5 А (AMIS-30542). Эти микросхемы функционально и конструктивно идентичны своим предшественникам в корпусе NQFP32 (7х7х1 мм), а отличия заключаются лишь в электрических характеристиках выходных силовых каскадов (см. таблицу 1).
Таблица 1. Основные технические характеристики драйверов AMIS-305xx Характеристики AMIS
|
Характеристики |
AMIS |
|||||
|
-30511 |
-30512 |
-30521 |
-30522 |
-30532 |
-30542 |
|
|
Рабочее напряжение, В |
6...30 |
6...30 |
6...30 |
6...30 |
6...30 |
6...30 |
|
Максимальный импульсный выходной ток, А |
0.8 |
0.8 |
1.6 |
1.6 |
3 |
5.5 |
|
Максимальное действующее значение тока, А |
0.4 |
0.4 |
0.8 |
0.8 |
2.1 |
3.9 |
|
RDSon (25 °С) не хуже1), Ом |
0.56 |
0.56 |
0.56 |
0.56 |
0.35 |
0.16 |
|
Частота коммутации, кГц |
45 |
45 |
45 |
45 |
45 |
45 |
|
Дискретность микрошагов |
1/32 |
1/32 |
1/32 |
1/32 |
1/32 |
1/32 |
|
Вход NXT |
Есть |
Есть |
Есть |
Есть |
Есть |
Есть |
|
Выход SLA |
Есть |
Есть |
Есть |
Есть |
Есть |
Есть |
|
Интерфейс связи |
SPI |
SPI |
SPI |
SPI |
SPI |
SPI |
|
Встроенный стабилизатор напряжения, |
— |
Есть |
— |
Есть |
Есть |
Есть |
|
Рабочий температурный диапазон, °C |
-40...125 |
|
|
|
|
|
|
Тип корпуса |
SOIC24 |
SOIC24 |
NQFP32 |
NQFP32 |
NQFP32 |
NQFP32 |
|
Примечание: |
||||||
Функциональные возможности микросхем показаны на рис. 1.
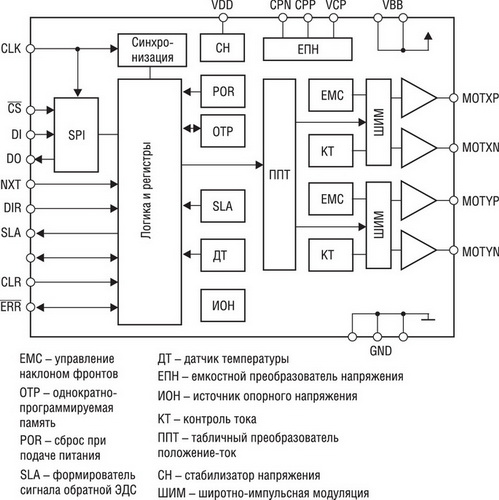
Рис. 1. Функциональная схема AMIS-30532/42
В левой части схемы сведены все выводы, которые образуют интерфейс подключения к управляющему микроконтроллеру (МК), в т.ч. четырехпроводной последовательный интерфейс SPI для конфигурации микросхемы, входы пошагового управления двигателем (DIR и NXT), выводы супервизорных функций МК (сторожевой таймер, сброс при подаче питания), вход аппаратного сброса (CLR) и выход с открытым стоком / ERR. Этот выход предназначен для сигнализации срабатывания защит и переходит в активное низкое состояние в следующих случаях:
- Сработал канал предупредительной сигнализации перегрева или произошло защитное отключение при перегреве;
- Сработала защита по току в любом из силовых каскадов (X или Y);
- Обнаружен обрыв цепей подключения ШД;
- Выявлена неисправность в блоке ЕПН.
Последняя функция играет очень важную роль в обеспечении «живучести» n-канальных MOSFET-транзисторов в верхнем уровне силовых коммутаторов. Необходимое напряжение управления затворами таких транзисторов по отношению к «плавающему» стоку формирует блок ЕПН и, таким образом, при определенных сбоях в его работе возможен рост сопротивления открытого канала (RDS(ON)) транзистора и, как следствие, его перегрев. Для упреждения такой ситуации в AMIS-30532/42 предусмотрена схема контроля уровня выходного напряжения ЕПН и сигнализации о его недопустимом снижении.
Такой широкий спектр защитных функций позволяет использовать драйверы в разнообразных применениях, например, в медицинской, автомобильной или промышленной технике. Специально для применений, которые должны соответствовать определенным нормам электромагнитных излучений, у драйверов предусмотрена возможность программного задания скорости изменения фронтов выходных импульсов (100...350 В/мкс). Однако, несмотря на такое разнообразие специальных возможностей, драйверы могут использоваться и в критичных к себестоимости массовых применениях, в т.ч. в бытовой технике и потребительской электронике. Это достигнуто за счет максимального упрощения и удешевления схемы включения, в т.ч. за счет интеграции стабилизатора напряжения 5 В для питания внешнего МК и исключения потребности во внешних токоизмерительных элементах. Убедиться в простоте схемы включения поможет рис. 2, на котором вокруг микросхемы драйвера можно увидеть лишь вспомогательные компоненты фильтрации и подтяжки логических уровней. Здесь также показаны внешние конденсаторы блока ЕПН (С6, С7) и управляющий МК, запитанный с вывода 32 драйвера от встроенного стабилизатора.
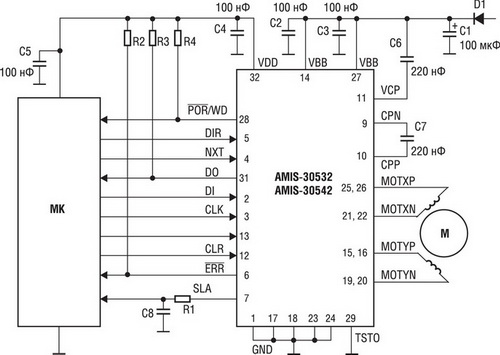
Рис. 2. Схема включения AMIS-30532/42
Драйверы AMIS-30532/42 поддерживают ряд интеллектуальных возможностей, направленных на повышение качества конечного решения при минимальных затратах. К ним относятся:
- Функция автоматического выбора быстрого или медленного снижения тока ШИМ-контроллером. Когда ШД находится в устойчивом положении, ШИМ-контроллер работает в режиме подъема и медленного снижения тока (FORWARD/SLOW DECAY), что гарантирует минимальность пульсаций тока. Когда же задается переход в положение, которое требует резкого изменения тока, вводится режим быстрого спада (FAST DECAY), который гарантирует минимальную длительность переходного процесса. Данная функция реализуется полностью автономно и не требует какой-либо конфигурации.
- Автоматическая адаптация заполнения импульсов. Данная функция вступает в силу, когда напряжение питания меньше удвоенной амплитуды обратной ЭДС. В таком случае, в целях поддержания среднего тока в обмотках на требуемом уровне, ШИМ-контроллер использует заполнение импульсов более 50%.
Еще одной, не менее интеллектуальной, является функция генерации аналогового сигнала SLA на одноименном выводе, который отражает уровень обратной ЭДС на обмотках двигателя. С его помощью возможна реализация ряда продвинутых алгоритмов управления ШД, в т.ч. с обнаружением опрокида двигателя, с работой без потери шагов, а также с адаптацией крутящего момента. Однако успешность реализации данных алгоритмов в первую очередь зависит от правильности понимания принципов формирования сигнала SLA. Эти принципы состоят в следующем:
- Измерение обратной ЭДС осуществляется путем выборки напряжения на обмотках двигателя в определенные моменты времени (назовем эти моменты обновлениями).
- Обновление происходит в одном из двух режимов, который задается пользователем: режим TRANSPARENT (внутренний бит SLAT = 1) и режим NOT-TRANSPARENT (SLAT = 0).
- В режиме TRANSPARENT обновление осуществляется с периодичностью цикла ШИМ, но только в области пересечения током через обмотку нуля. В этом режиме пользователь может наблюдать всю форму напряжения на обмотке двигателя вплоть до достижения уровня обратной ЭДС. Из этого сигнала можно извлечь информацию о фактической частоте вращения ШД, уровне напряжения питания и собственно об уровне обратной ЭДС.
- В режиме NOT-TRANSPARENT обновление вывода SLA осуществляется только последней выборкой, выполненной с цикличностью ШИМ, когда ток обмотки пересекал уровень нуля. В этом режиме текущее значение напряжения на выводе SLA всегда отражает уровень обратной ЭДС, но только в момент предшествующего пересечения нуля током через обмотку.
Отличия в механизмах формирования сигнала SLA в разных режимах иллюстрирует рис. 3.
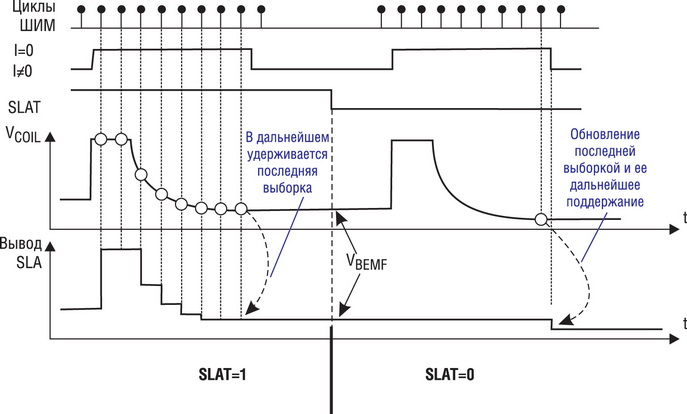
Рис. 3. Формирование сигнала SLA в разных режимах
Подытоживая сказанное, можно сформулировать правило, соблюдение которого будет гарантировать корректность интерпретации сигнала SLA: при изменении разрешающей способности микрошага необходимо гарантировать, что не возникнет смещение, которое приведет к несовпадению положений микрошага и пересечения нуля. Данное правило можно сформулировать математически и использовать в программе МК для обнаружения ошибок в работе ШД: MOD(P, Y) = 0, где MOD - оператор взятия остатка от деления P на X, P – положение микрошага (считывается из регистра MSP), а Y - константа, которая равна 2, 4, 8 или 16 при использовании микрошагов 1/16, 1/8, 1/4 или 1/2, соответственно. Неравенство нулю MOD(P, Y) означает, что напряжение на выводе SLA нельзя принимать за обратную ЭДС. Для примера рассмотрим две ситуации, проиллюстрированные на рис. 4.
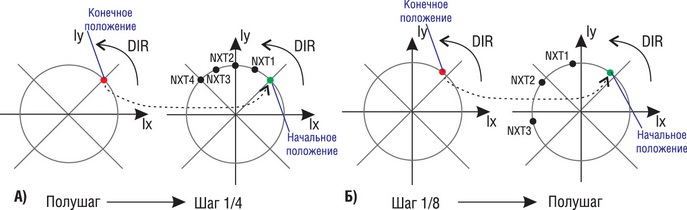
Рис. 4. Иллюстрация смены разрешающей способности шага без добавления смещения (а) и с его добавлением (б)
Здесь показаны диаграммы работы ШД. Точки пересечения окружности с осевыми линиями указывают на позиции, где возникает пересечение нуля токами обмоток. В первом случае (рис. 4а) выполняется изменение разрешающей способности в большую сторону, с полушага на 1/4 микрошага, что не приводит к образованию смещения. Во втором же случае изначально использовался микрошаг 1/8 и в указанном конечном положении происходит уменьшение разрешающей способности на полушаг, что приводит к образованию смещения и дальнейшему несовпадению позиций ШД с точками пересечения нуля. Проблема «смещения» существует при использовании режима полного шага, т.к. позиции пересечения нуля здесь никогда не совпадают с позицией шага (стартовая позиция соответствует полушагу). Решить эту проблему можно, если в режиме скомпенсированного полушага подавать на вход NXT два импульса подряд. В таком случае, движение начнется с позиции, когда ток в обмотке X равен нулю, и, ввиду невозможности выполнить полушаг за промежуток времени между импульсами на входе NXT, перемещение будет совершаться полными шагами. Некоторое ограничение по использованию вывода SLA существует при работе драйвера на высоких температурах. В такой ситуации оцифровку напряжения SLA необходимо выполнять сразу после его обновления и за как можно более короткое время. Это связано с тем, что с ростом температуры напряжение на выводе SLA непрерывно снижается и принимает действительное значение только в момент обновления. Данная особенность накладывает ограничение на использование интегрирующих и некоторых дельта-сигма АЦП для оцифровки напряжения на выводе SLA.
Если же все особенности формирования сигнала SLA будут учтены, он будет эффективным средством для диагностики работы ШД. Например, обнаружить опрокид ШД можно по снижению напряжения SLA (SLAT = 0) до величины ниже порогового уровня. Более детально об особенностях формирования сигнала SLA и его использовании можно узнать в рекомендациях по применению AND8399/D, доступные для скачивания на сайте ON Semi (http://onsemi.com/).
Выше уже упоминались возможности AMIS-30532/42, с помощью которых можно диагностировать неисправности в цепях подключения ШД. Рассмотрим их подробнее. К числу таких неисправностей относятся обрывы в обмотках и цепях их подключения, а также 14 вариантов коротких замыканий, в т.ч. - обмоток, между обмотками и с любой из линий питания. Для обнаружения обрыва драйверы контролируют, с каким заполнением импульсов работают оба ШИМ-стабилизатора тока. Когда образуется обрыв, ШИМ-стабилизатор, в попытке достигнуть заданного блоком ППТ тока, перейдет к работе со 100%-ым заполнением импульсов. По истечении 32 мс такой работы драйвер принимает решение об обрыве в соответствующем канале и устанавливает флаг OPENX или OPENY. Использование указанной выдержки времени накладывает некоторые ограничения на максимальную скорость вращения ШД, при которой гарантируется работоспособность функции обнаружения обрыва (см. таблицу 2).
Таблица 2. Максимальная скорость для обнаружения
обрыва Режим шага Скорость
|
Режим шага |
Скорость |
|
Полный |
62.5 |
|
1/2 |
46.9 |
|
1/4 |
54.7 |
|
1/8 |
58.6 |
|
1/16 |
60.5 |
|
1/32 |
61.5 |
Для диагностирования коротких замыканий предусмотрено два каскада. Первый каскад взаимодействует со всеми верхними MOSFET-транзисторами выходных полномостовых коммутаторов X и Y. Его задачей является ограничение выходного тока и установка флага OVCXPT, OVCXNT, OVCYPT или OVCYNT в случае обнаружения перегруза соответствующего транзистора. Аналогичным образом, но прецизионно, второй каскад ограничивает ток через нижние транзисторы и устанавливает флаг OVCXPB, OVCXNB, OVCYPB и OVCYNB при обнаружении перегруза соответствующего нижнего транзистора. Сама по себе установка данных флагов свидетельствует только о перегрузке транзисторов, а для достоверного установления вида короткого замыкания, который вызвал такую перегрузку, потребуется дополнительный анализ, в котором должна участвовать информация о позиции ШД. Например, если в позиции ШД, отмеченной красной точкой на рис. 4а, обнаружится установка флага OVCXNB или OVCXPB (перегруз любого нижнего транзистора в канале X), это укажет на существование короткого замыкания между выводом XP и напряжением VBB. Полная таблица для дешифрации вида короткого замыкания в полушаговом режиме приводится в рекомендациях по применению AND8403/D.
Заключение
Появление в семействе AMIS-305xx более сильноточных представителей существенно расширяет области их применения. Новые драйверы AMIS-30532 и AMIS-30542 примерно вдвое и втрое, соответственно, превосходят своего самого сильноточного предшественника и полностью совместимы по расположению выводов схемы включения и функциональным возможностям с другими представителями семейства в корпусе NQFP32. Это дает возможность модернизировать существующие разработки путем простой замены микросхемы драйвера без необходимости повторной разводки печатной платы. Как и все представители семейства, AMIS-30532 и AMIS-30542 отвечают условиям применения в самых требовательных применениях, в т.ч. за счет реализации множества диагностических функций. Однако, несмотря на многообразие поддерживаемых функций, драйверы имеют чрезвычайно простую схему включения с минимальным числом внешних компонентов, что открывает перспективы их использования и в критичных к себестоимости применениях.



